
 {0}6209261}
{0}6209261}
ໜ້າທີ່ຫຼັກຂອງອຸປະກອນ:
TN5005 ເຄື່ອງທົດສອບແຮງບິດ tensile ຮັບຮອງເອົາໂຄງສ້າງກອບຖັນ, ຄວາມກົດດັນ tensile ແລະແຮງບິດໄດ້ຖືກທົດສອບຢູ່ໃນກອບໃນເວລາດຽວກັນ, ສອງຊ່ອງທາງຖືກນໍາໃຊ້ແຍກຕ່າງຫາກ, ຄວາມກົດດັນ tensile ແມ່ນ loaded ໂດຍ servo ນໍາໄຟຟ້າ screw, torsion ແມ່ນການໂຫຼດ ໂດຍ servo motor reducer ແລະເຊັນເຊີ torque ແບບເຄື່ອນໄຫວ, ເຄື່ອງທົດສອບແຮງບິດຂອງແຮງດັນແມ່ນໃຊ້ຕົ້ນຕໍ ສໍາລັບວັດສະດຸທີ່ບໍ່ແມ່ນໂລຫະ, ພາກສ່ວນໂຄງສ້າງມູນຄ່າຜົນບັງຄັບໃຊ້ຂະຫນາດນ້ອຍ, stopper ຕຸກຢາງ, ແລະອື່ນໆ. ລະບົບຍັງສາມາດດໍາເນີນການຢູ່ໃນແກນດຽວ, ແລະການທົດລອງ tensile ຫຼື torsion ທີ່ສອດຄ້ອງກັນສາມາດດໍາເນີນການໄດ້.
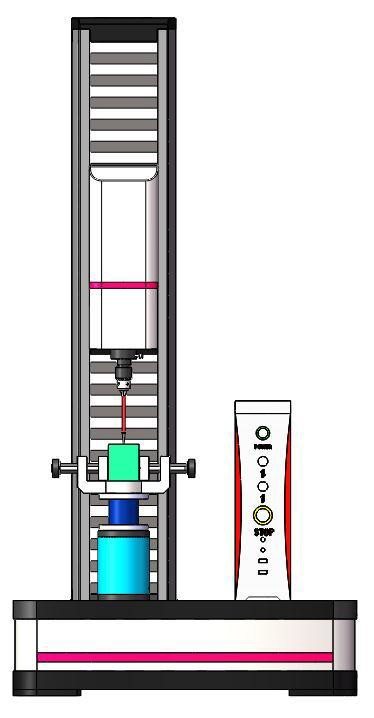
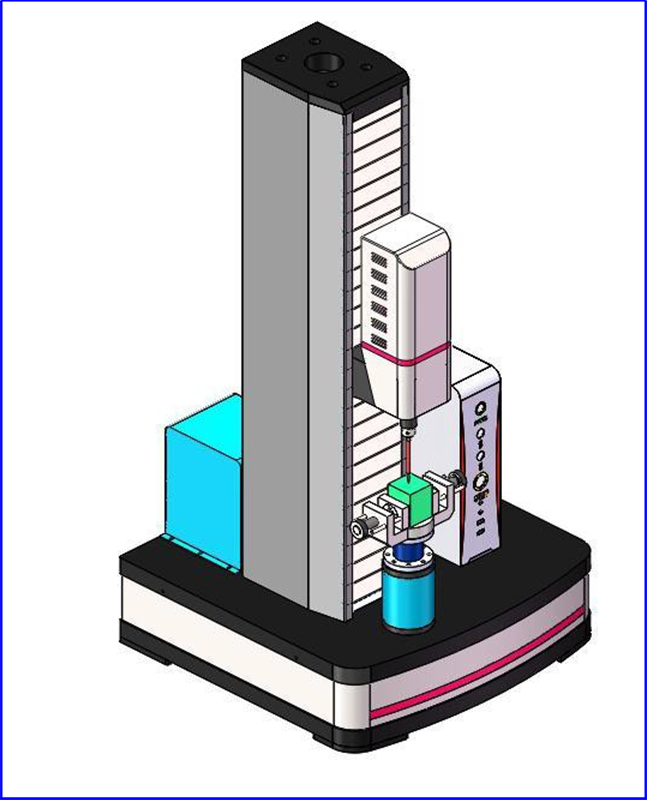
ໂຄງສ້າງທັງໝົດໃຊ້ໂຄງສ້າງກອບປະເພດຖັນ, ເຊິ່ງປະກອບດ້ວຍຖັນ, ຕາຕະລາງເລື່ອນ, ລຳກາງເຄື່ອນທີ່ຂ້າມ, ການໂຫຼດຄວາມກົດດັນແຮງດຶງ, ການໂຫຼດແຮງບິດ, ແລະສາຍທາງເທິງຂອງສາຍເຊື່ອມຕໍ່ເທິງ.
ການທົດລອງແຮງດັນ ແລະແຮງບິດສາມາດທົດສອບແຍກກັນ ຫຼືພ້ອມກັນໄດ້, ແລະທັງສອງອັນບໍ່ສາມາດສົມທົບກັນໄດ້ໃນການທົດລອງ.
ການປັບພື້ນທີ່ຖືກປັບດ້ວຍສະກູນໍາຂອງປາຍແຕ້ມ, ແລະການຄວບຄຸມໄຟຟ້າແມ່ນງ່າຍທີ່ຈະດໍາເນີນການ.
ປຸ່ມເຄື່ອນທີ່ຂ້າມລຳແສງ ແລະປຸ່ມຢຸດສຸກເສີນແມ່ນວາງໄວ້ຂ້າງເຄື່ອງຈັກຫຼັກ, ເຊິ່ງສະດວກສຳລັບເຄື່ອງທົດສອບໃນການເຮັດວຽກ;
ອຸປະກອນດັ່ງກ່າວໄດ້ຮັບຮອງເອົາການອອກແບບທີ່ເປັນເອກະພາບ, ໄດ້ມາດຕະຖານ ແລະແບບໂມດູນ, ເຊິ່ງມີລັກສະນະຂອງການປຽກນໍ້າໜ້ອຍ, ການຕອບສະໜອງສູງ, ມີຊີວິດຊີວາສູງ ແລະການອອກແບບບໍ່ມີຊ່ອງຫວ່າງ.
ເໝາະສຳລັບການທົດສອບແຮງດັນສະຖິດ/ແຮງດັນ/ແຮງດັນ/ແຮງບິດ/ແຮງບິດ;
ລະດັບຄວາມແຮງຂອງການທົດສອບ +/-1kN, ເສັ້ນເລືອດຕັນໃນທັງໝົດ 250mm;
Rated torque +/-5Nm, unlimited torque Angle;
ເໝາະສຳລັບການທົດສອບການໂຫຼດຄົງທີ່ໃນໄລຍະຍາວ;
ເຊັນເຊີການຍ້າຍ, ເຊັນເຊີການໂຫຼດ, ເຊັນເຊີ torque ເຊັນເຊີມຸມທີ່ມີແຮງ, ແຮງບິດການເຄື່ອນທີ່ Angle ວົງປິດຄວບຄຸມວົງປິດ;
ເຊັນເຊີປະກອບການບີບອັດ ແລະບິດເບືອນຖືກວາງຢູ່ເທິງຂອງບ່ອນເຮັດວຽກ, ແລະເຄື່ອງມືທີ່ສອດຄ້ອງກັນສາມາດເຊື່ອມຕໍ່ເພື່ອຮັບຮູ້ການທົດລອງຕ່າງໆ;
ອຸປະກອນອ້າງອີງ (ຕາມຮູບຂ້າງລຸ່ມນີ້)

 {6082097
{6082097
ຄວາມຕ້ອງການພາລາມິເຕີດ້ານວິຊາການ:
1. ຂະໜາດສູງສຸດ: 550mm× 520x1150mm
2. ຊ່ອງຍືດ: 0-250mm
3. ຊ່ວງ Torsion: 0~9999 ອົງສາ (ບໍ່ຈຳກັດ)
4. ຊ່ວງຄວາມໄວການແຕ້ມ: 0.01-500mm/min
5. ຊ່ວງຄວາມໄວບິດ: 0.01-720 ອົງສາ / ນາທີ
6. Push-pull rated test force: ±1000N, ຄວາມຖືກຕ້ອງ ±1%, ໄລຍະຄວາມຖືກຕ້ອງ 2%-100% FS.
7. ລະດັບແຮງບິດ: 5N.m, ຄວາມຖືກຕ້ອງ ±1%, ໄລຍະຄວາມຖືກຕ້ອງ 2%-100% FS.
8. ໂໝດຄວບຄຸມ: ການຄວບຄຸມວົງປິດ;
9. ຄວາມເຄັ່ງຕຶງ, ຈໍສະແດງຜົນຄວາມກົດດັນ: ຄວາມເຄັ່ງຕຶງການຄວບຄຸມຄອມພິວເຕີ ຫຼື ການໂຫຼດຄວາມກົດດັນ, ການສະແດງຜົນເວລາຈິງຂອງຊອບແວ
10. ຈໍສະແດງຜົນແຮງບິດ: ການໂຫຼດແຮງບິດຄວບຄຸມຄອມພິວເຕີ, ການສະແດງຜົນແຮງບິດໃນເວລາຈິງ, ມຸມ
11. ສະພາບແວດລ້ອມທົດລອງ: 25±3℃, ຄວາມຊຸ່ມຊື່ນ: 50RH%
12. ອຸປະກອນປ້ອງກັນ: ປ້ອງກັນຂີດຈຳກັດ, ປ້ອງກັນຂີດຈຳກັດແຮງດຶງ, ປ້ອງກັນຂີດຈຳກັດແຮງບິດ
13. ວິທີການ Clamping: ການລັອກກົນຈັກ
14. ນ້ຳໜັກເຄື່ອງ: ປະມານ 70kg
15. ການສະຫນອງພະລັງງານເຮັດວຽກ: 220AC, 50HZ
16. ຊ່ວງຄວາມຖີ່: 0.001-2Hz. (ອາທິດຕໍ່າ)
17. ປະເພດຕົວຄວບຄຸມ: ຊ່ອງດຽວ, ການຍ້າຍ ແລະບັງຄັບສອງຊ່ອງວົງປິດ.
18. ຄື້ນທົດສອບຫຼັກ: ຄື້ນຊີນ, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມ, ຄື້ນສະຫຼຽງ ແລະ ອື່ນໆ.
ລະບົບການຄວບຄຸມ:
Supertest ສອງຊ່ອງເຄື່ອງຄວບຄຸມ servo ໄຮໂດຼລິກດິຈິຕອນເຕັມຮູບແບບ ແລະລະບົບຊອບແວເພື່ອບັນລຸການຄວບຄຸມແບບວົງປິດດິຈິຕອນເຕັມຮູບແບບຂອງເຄື່ອງທົດສອບ.
1. ຕົວຊີ້ວັດດ້ານເຕັກນິກຫຼັກຂອງຕົວຄວບຄຸມ servo ໄຮໂດຼລິກສອງຊ່ອງດິຈິຕອນເຕັມຮູບແບບ
ຈຳນວນຊ່ອງຄວບຄຸມ: 2.
ແຕ່ລະຊ່ອງປະກອບມີສາມວົງປິດການຄວບຄຸມຂອງແຮງທົດສອບ (ແຮງບິດ), ການຍ້າຍ (ມຸມ) ແລະຄວາມເຄັ່ງຕຶງ, ແລະມີຫນ້າທີ່ຂອງການສະຫຼັບຂອງຮູບແບບການຄວບຄຸມທີ່ລຽບໂດຍບໍ່ມີການລົບກວນ.
ກຳນົດຄ່າຈໍານວນຂອງສ່ວນຕິດຕໍ່ການຄວບຄຸມເວັບໄຊ: 2.
ໜ່ວຍປັບສັນຍານແບບດິຈິຕອລທັງໝົດສາມໜ່ວຍ: ແຮງທົດສອບ (ແຮງບິດ), ການເຄື່ອນທີ່ (ແຮງບິດ), ເມື່ອຍສາມວົງຈອນຄວບຄຸມວົງປິດ. ມັນມີຮູບແບບການຄວບຄຸມການທໍາງານຂອງສະຫຼັບກ້ຽງໂດຍບໍ່ມີການລົບກວນ.
ຄວາມລະອຽດຂອງຕົວຄວບຄຸມ A/D ແລະ D/A ແມ່ນ 16 ບິດ.
ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມ: ຄວາມຖືກຕ້ອງສົມທຽບຂອງການຄວບຄຸມສະຖິຕິແມ່ນດີກວ່າ 1% FS.
I/O input ແລະ output ທີ່ຈໍາເປັນອື່ນໆ: ສີ່ inputs ອະນາລັອກ, ສີ່ analog output interfaces; ສີ່ input ດິຈິຕອນ, ສີ່ການໂຕ້ຕອບຜົນຜະລິດດິຈິຕອນ.
ຈຳກັດຟັງຊັນການຕັ້ງຄ່າພາລາມິເຕີ.
2. ເຄື່ອງທົດສອບ (ລະບົບ) ຊອບແວຄວບຄຸມ Supertest3.0:
2.1 ຊອບແວການຈັດການລະບົບ simttest3.0: ຊອບແວນີ້ແມ່ນພື້ນຖານຂອງການເຮັດວຽກຂອງຕົວຄວບຄຸມ servo ດິຈິຕອນທັງໝົດ, ໜ້າທີ່ຫຼັກຂອງມັນແມ່ນການຈັດການຊັບພະຍາກອນຂອງຮາດແວຂອງລະບົບຄວບຄຸມ, ກຳນົດເຊັນເຊີ, ປັບຕົວກໍານົດການຄວບຄຸມດິຈິຕອນ, ຕັ້ງຄ່າ ການປົກປ້ອງ, ສະແດງຮູບແບບການຄວບຄຸມປະຈຸບັນແລະສະຖານະພາບການຜະລິດແລະການປັບເຊັນເຊີ.
2.2 ຊອບແວທົດສອບອະເນກປະສົງ Supertest3.0: ຊອບແວນີ້ເປັນຊອບແວທົດສອບທີ່ມີຄວາມຍືດຫຍຸ່ນ, ມີຄຸນສົມບັດເຕັມຮູບແບບ, ຜູ້ໃຊ້ສາມາດໃຊ້ມັນເພື່ອອອກແບບວິທີການທົດສອບພິເສດ, ແຕ່ບໍ່ຈໍາເປັນຕ້ອງມີການຂຽນໂປຼແກຼມ. ຊອບແວນີ້ມີຄວາມຫລາກຫລາຍຂອງຫນ້າທີ່ຄວບຄຸມ, ຫນ້າທີ່ເກັບຂໍ້ມູນແລະຫນ້າທີ່ຊ່ວຍອື່ນໆຂອງຕົວຄວບຄຸມ servo ແມ່ນເຮັດຢູ່ໃນກະດານໃນຮູບແບບຂອງ ICONS, ຜູ້ໃຊ້ສາມາດລາກແລະວາງ ICONS ຟັງຊັນເຫຼົ່ານີ້ເຂົ້າໄປໃນກະດານກໍານົດການທົດສອບດ້ວຍຫນູ, ແລະປະສົມປະສານ. ເຂົາເຈົ້າຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້ຈະ, ທ່ານສາມາດທົດສອບຕາມວິທີການທີ່ຜູ້ໃຊ້ກໍານົດ. ຊອບແວສາມາດຖືກນໍາໃຊ້ສໍາລັບການສຸ່ມ spectrum (ປະສົມປະສານຂອງຂະບວນການທົດລອງທີ່ແຕກຕ່າງກັນ) ການທົດສອບ.
2.3 ລະບົບຄວບຄຸມ
ລະບົບການວັດແທກວົງປິດແບບດິຈິຕອລເຕັມຮູບແບບ ແລະການຄວບຄຸມມີຄຸນສົມບັດຂັ້ນສູງຫຼາຍອັນ ແລະນະວັດຕະກໍາທາງເທັກໂນໂລຍີ, ສ່ວນໃຫຍ່ແມ່ນສະທ້ອນໃຫ້ເຫັນໃນ:

1. ຮັບຮູ້ສີ່ປະເພດຂອງການຄວບຄຸມວົງປິດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຜິດປົກກະຕິຂອງຕົວຢ່າງ, ການຍ້າຍ beam ແລະຂະບວນການທົດສອບ;
2. ລະບົບການໄດ້ມາຂໍ້ມູນປະກອບດ້ວຍ 4 ຊ່ອງການແປງ A/D ຄວາມຊັດເຈນສູງ 24-ບິດ. ຄວາມລະອຽດສູງສຸດແມ່ນ 1/300000, ຂະບວນການທັງຫມົດບໍ່ໄດ້ຖືກແບ່ງອອກ;
3, ເລືອກ BB, AD, Xilinx ແລະອຸປະກອນປະສົມປະສານຍີ່ຫໍ້ຕົ້ນສະບັບອື່ນໆ, ການອອກແບບດິຈິຕອນທັງຫມົດ;
4, ສອດຄ່ອງກັບມາດຕະຖານລົດເມ PCI, ການກໍານົດແລະການຕິດຕັ້ງອັດຕະໂນມັດຂອງໄມໂຄຄອມພິວເຕີ, ເພື່ອ "ສຽບແລະທົດສອບ";
5, ລະບົບການວັດແທກທາງອີເລັກໂທຣນິກທີ່ບໍ່ມີອົງປະກອບອະນາລັອກເຊັ່ນ potentiometers, ເພື່ອຮັບປະກັນການປ່ຽນແທນກັນ, ການຮັກສາງ່າຍ ແລະປ່ຽນແທນ.

ການໂຕ້ຕອບຊອບແວ
ລາຍການຊິ້ນສ່ວນ:
| ລາຍການ |
ຊື່ |
ຂໍ້ມູນຈໍາເພາະ |
ແບບ |
ປະລິມານ |
| 1 |
ຊັ້ນໂຫຼດໂຮສ |
1KN |
1 |
ປົກຄອງຕົນເອງ |
| 2 |
ສະກູ |
2510 |
1 |
ໄຕ້ຫວັນ TBI |
| 3 |
ລົດໄຟແນະນຳເສັ້ນ (1 ຕົວເລື່ອນ) |
30 |
2 |
ຫ້ວຍອິນ |
| 4 |
Servo motor |
1500W |
2 |
Panasonic |
| 5 |
ເຊັນເຊີຜົນບັງຄັບໃຊ້ສອງອົງປະກອບ |
1KN/5Nm |
1 |
ກຳນົດເອງ |
| 6 |
ການທົດສອບແຮງບິດ |
200N.m |
1 |
ປົກຄອງຕົນເອງ |
| 7 |
Servo motor |
1500W |
1 |
Panasonic |
| 8 |
ຕົວຫຼຸດຄວາມຊັດເຈນ |
P60/5/750 |
1 |
Troda |
| 9 |
ການວັດແທກດຶງແລະຄວາມກົດດັນແລະລະບົບຄວບຄຸມແລະຊອບແວ |
|
1 |
autonomous (ສ່ວນຕິດຕໍ່ຜູ້ໃຊ້ຫຼັກຂອງຊອບແວບວກກັບປ່ອງຢ້ຽມຂໍ້ສັງເກດ) |
| 10 |
ການວັດແທກ Torsion ແລະລະບົບການຄວບຄຸມ ແລະຊອບແວ |
|
1 |
autonomous (ສ່ວນຕິດຕໍ່ຜູ້ໃຊ້ຫຼັກຂອງຊອບແວບວກກັບປ່ອງຢ້ຽມຂໍ້ສັງເກດ) |
| 11 |
ຕູ້ຄວບຄຸມ (ການຄວບຄຸມກະແສໄຟຟ້າອ່ອນ) |
|
1 |
ປົກຄອງຕົນເອງ |
| 12 |
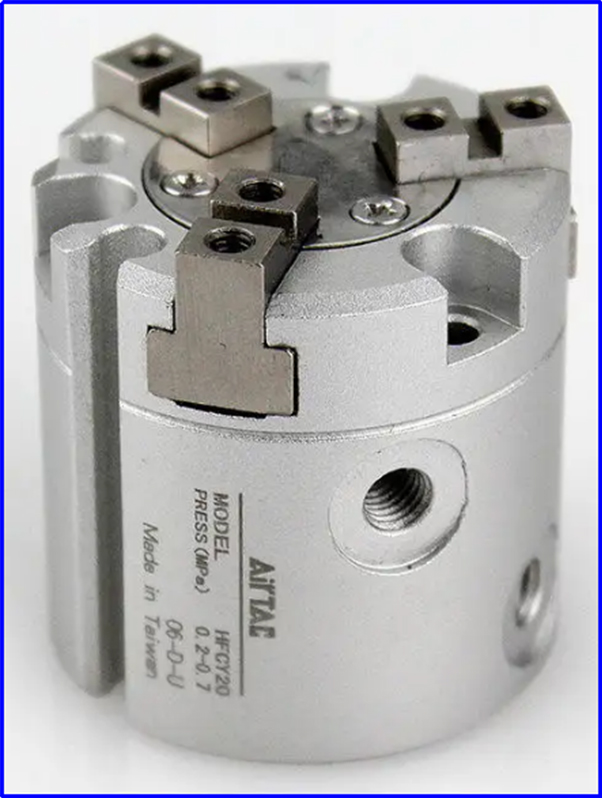
ເຄື່ອງມື |
ທໍ່ລົມສາມຄາງກະໄຕ |
| 13 |
ເອກະສານ |
ຄໍາແນະນໍາການດໍາເນີນງານ, ຄໍາແນະນໍາຊອບແວ, ໃບຢັ້ງຢືນ, ແລະອື່ນໆ |

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese















 " height="400" />
" height="400" /> 







