1. ລາຍລະອຽດອຸປະກອນ
1) ເຄື່ອງທົດສອບສ່ວນໃຫຍ່ແມ່ນໃຊ້ໄດ້ກັບການທົດສອບແຮງດຶງຂອງສາຍເຊືອກເຫຼັກທຸກຊະນິດ, ຕ່ອງໂສ້ສະມໍ, ເຊືອກຜູກ, ເຊືອກຜູກ ແລະຕົວຢ່າງອື່ນໆ.
2) ເຈົ້າພາບໂຄງສ້າງຂອງກອບ, ທໍ່ກະບອກດ່ຽວ rod double acting.
3) ເຊັນເຊີການໂຫຼດຄວາມດັນທີ່ມີຄວາມຊັດເຈນສູງເພື່ອວັດແທກແຮງ, ຕົວເຂົ້າລະຫັດ photoelectric ເພື່ອວັດແທກການຍ້າຍ.
4) ເອກະສານຄັດຕິດແບບເຄິ່ງເປີດ (ຍັງສາມາດອອກແບບແຍກສິ່ງຄັດຕິດຕົວຍຶດອື່ນໄດ້) ສະດວກ ແລະເຊື່ອຖືໄດ້. ອຸປະກອນເສີມສາມາດເລືອກໄດ້ຕາມປະເພດຕ່າງໆແລະຂໍ້ກໍາຫນົດທີ່ແຕກຕ່າງກັນຂອງຕົວຢ່າງ.
5) ລໍາເຄື່ອນຍ້າຍສາມາດອໍານວຍຄວາມສະດວກໃນການປັບພື້ນທີ່ທົດສອບ, ແລະມັນໄດ້ຖືກຕິດຕັ້ງດ້ວຍກະບອກສູບ pin ແລະສະຖານີສູບເພື່ອຮັບຮູ້ການດຶງ pin ອັດຕະໂນມັດ.
6) ການນໍາໃຊ້ເທກໂນໂລຍີການຄວບຄຸມ electro-hydraulic servo, ດ້ວຍຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຍ້າຍແລະ loop ຄວບຄຸມປິດອື່ນໆ, ສາມາດໂຫຼດໄດ້ໃນຂັ້ນຕອນ. ໄມໂຄຄອມພິວເຕີຈະເກັບກຳຂໍ້ມູນ ແລະປະມວນຜົນຂໍ້ມູນໂດຍອັດຕະໂນມັດ.
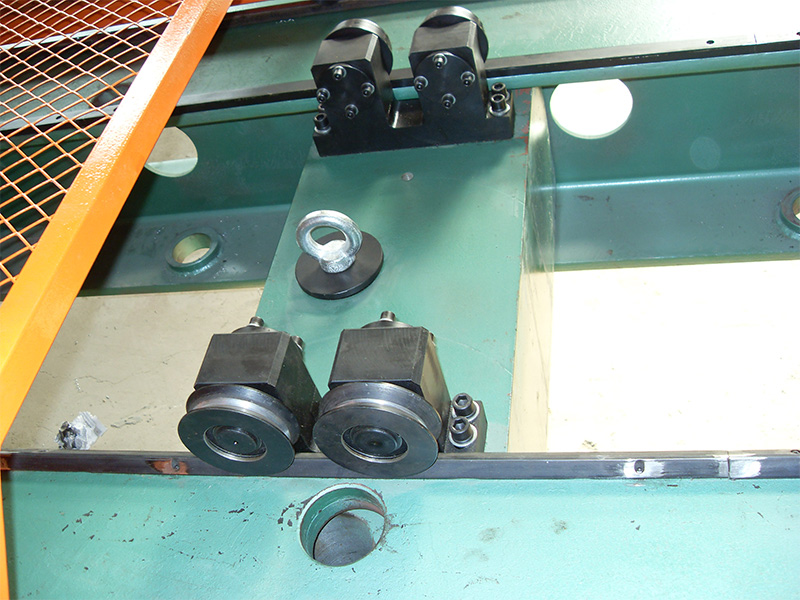
2. ແຜນວາດຮູບລັກສະນະ
ຮູບລັກສະນະແມ່ນສະແດງຢູ່ໃນຮູບ 1
3. ເນື້ອໃນຫຼັກ ແລະຂອບເຂດຂອງແອັບພລິເຄຊັນ
ເຄື່ອງທົດສອບຮັບຮອງເອົາໂຄງສ້າງຂອງກອບ, ທໍ່ທໍ່ລູກສູບດຽວປະຕິບັດສອງເທົ່າເພື່ອໃຊ້ແຮງທົດສອບ, ເຊັນເຊີການໂຫຼດເພື່ອວັດແທກແຮງ, ພື້ນທີ່ຍືດສາມາດປັບໄດ້ຕາມຄວາມຍາວຂອງຕົວຢ່າງຕົວຢ່າງ, ຮູບແບບການໂຫຼດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບສາມາດຄວບຄຸມໂດຍຄອມພິວເຕີ, ແລະຂໍ້ມູນການທົດສອບສາມາດໄດ້ຮັບການປຸງແຕ່ງອັດຕະໂນມັດຕາມຄວາມຕ້ອງການຂອງວິທີການທົດສອບ. ເຄື່ອງຈັກເຮັດການທົດສອບ tensile ຜະລິດຕະພັນສໍາລັບອຸດສາຫະກໍາຂຸດຄົ້ນບໍ່ແຮ່, ທີ່ຖືກນໍາໃຊ້ສໍາລັບສາຍເຊືອກເຫຼັກ, ລະບົບຕ່ອງໂສ້ສະມໍ, ສາຍແອວຍົກ. ການໂຫຼດ tensile, ຄວາມເສຍຫາຍແລະການທົດສອບອື່ນໆຂອງຜະລິດຕະພັນເຊັ່ນ: ສາຍແອວຄວາມປອດໄພຮຽກຮ້ອງໃຫ້ມີການດໍາເນີນງານທີ່ມີຄວາມຍືດຫຍຸ່ນແລະສະດວກ, ການໂຫຼດຊ້າແລະຫມັ້ນຄົງ, ແລະຄວາມອາດສາມາດຖືທີ່ເຂັ້ມແຂງຂອງຮ່າງກາຍ. ພາກສ່ວນທີ່ສໍາຄັນຂອງແຫຼ່ງນ້ໍາມັນ - ຫນ່ວຍບໍລິການໄຟຟ້ານ້ໍາມັນ pump, ປ່ຽງການບັນເທົາທຸກ, reversing valve ແມ່ນຜະລິດຕະພັນຍີ່ຫໍ້, ຕົນເອງພັດທະນາເຄື່ອງຂະຫຍາຍສຽງດິຈິຕອນຢ່າງເຕັມທີ່, ນໍາໃຊ້ເພື່ອບັນລຸການຄວບຄຸມສາມວົງປິດຂອງລະບົບ.
4. ຕົວກໍານົດການດ້ານວິຊາການຫຼັກ ແລະຂໍ້ມູນສະເພາະ
1. ແຮງທົດສອບສູງສຸດ: 3000kN;
2. ຊ່ວງແຮງວັດແທກ: 12 ~ 3000kN;
3. ການທົດສອບຄວາມຖືກຕ້ອງຂອງຜົນບັງຄັບໃຊ້: ±1%;
4. ພື້ນທີ່ທົດສອບ: 1000mm;
5. Piston stroke: 1000mm;
6. ໄລຍະການວັດແທກການຍ້າຍ: 1500mm
7. ຄວາມລະອຽດການວັດແທກການຍ້າຍ: 0.01mm;
8. Pull head no-load fast forward speed: ບໍ່ຕ່ຳກວ່າ 150mm/min;
9. ຄວາມໄວການທົດສອບ: 0-100mm/min;
11. ວິທີການວັດແທກຜົນບັງຄັບໃຊ້: Load sensor force measurement;
12. ໂໝດການທົດສອບການຄວບຄຸມ: ຄອມພິວເຕີຄວບຄຸມຂະບວນການທົດສອບໂດຍອັດຕະໂນມັດ, ໜ້າຈໍຄອມພິວເຕີຈະສະແດງຜົນບັງຄັບໃຊ້ການທົດສອບ ແລະເສັ້ນໂຄ້ງຂອງການທົດສອບ ແລະປະມວນຜົນຂໍ້ມູນການທົດສອບໂດຍອັດຕະໂນມັດຕາມຄວາມຕ້ອງການຂອງວິທີການທົດສອບ;
13. ຂະໜາດລວມຂອງເຈົ້າພາບແມ່ນປະມານ (ຍາວ * width * ສູງ): 1000x1200x2900
14. ສາມາດສະແດງເສັ້ນໂຄ້ງການທົດສອບໄດ້ຫຼາກຫຼາຍຊະນິດ: ການບັງຄັບ-ຍ້າຍ, ເວລາບັງຄັບ, ການປ່ຽນຮູບຂອງແຮງ, ຄວາມເຄັ່ງຕຶງ ແລະ ອື່ນໆ.
15 ຄອນໂຊນຖືກແຍກອອກຈາກໂຮສ, ມີໄລຍະຫ່າງທີ່ປອດໄພ, ແລະແມ່ຂ່າຍຄວນມີມາດຕະການປ້ອງກັນຄວາມປອດໄພ
16. ອຸປະກອນປ້ອງກັນພິເສດເພື່ອປ້ອງກັນການບາດເຈັບເມື່ອຕ່ອງໂສ້ຫັກ
5. ເງື່ອນໄຂການເຮັດວຽກ
ກ) ອຸນຫະພູມອາກາດລ້ອມຮອບ: 10 ~ 35 ℃;
b) ຄວາມຊຸ່ມຊື່ນຂອງພີ່ນ້ອງບໍ່ເກີນ 80%;
c) ບໍ່ມີການສັ່ນສະເທືອນໃນສະພາບແວດລ້ອມ;
d) ບໍ່ມີສື່ທີ່ກັດກ່ອນ;
e) ການຕິດຕັ້ງແນວນອນບົນພື້ນຖານທີ່ໝັ້ນຄົງ; ລະດັບບໍ່ສູງກວ່າ 0.2/1000;
f) ຊ່ວງຄວາມເໜັງຕີງຂອງແຮງດັນການສະໜອງພະລັງງານຈະຕ້ອງບໍ່ເກີນ ±10% ຂອງແຮງດັນທີ່ຈັດອັນດັບ.
6. ລັກສະນະໂຄງສ້າງ ແລະຫຼັກການເຮັດວຽກ
ເຄື່ອງຈັກປະກອບດ້ວຍເຄື່ອງຈັກຕົ້ນຕໍ, ຕູ້ຄວບຄຸມໄຟຟ້າ, ແຫຼ່ງນ້ໍາມັນແລະອື່ນໆ.
6.1 ພາກສ່ວນໂຮສ
ໃນເວລາທີ່ແຫຼ່ງນ້ໍາມັນເອກະລາດຄວບຄຸມນ້ໍາມັນເຂົ້າໄປໃນກະບອກສູບ, piston ເຄື່ອນໄປຂ້າງຫນ້າ, ແລະ beam ຂ້າມເຄື່ອນທີ່ໄດ້ຖືກຂັບເຄື່ອນໂດຍ workbench, ແລະບ່ອນນັ່ງ clamp ໄດ້ຖືກຍ້າຍ, ເພື່ອໃຫ້ຕົວຢ່າງສາມາດ stretching ໃນພື້ນທີ່ stretching ໄດ້.
ກະບອກສູບ ແລະ ລູກສູບແມ່ນສ່ວນສຳຄັນຂອງເຄື່ອງຈັກຫຼັກ, ດ້ານໜ້າຕິດຕໍ່ຂອງພວກມັນແມ່ນເຄື່ອງຈັກທີ່ມີຄວາມແມ່ນຍຳ, ແລະຮັກສາການເກັບກູ້ ແລະ ຟິມນ້ຳມັນໃຫ້ພໍດີ, ເພື່ອໃຫ້ລູກສູບສາມາດເຄື່ອນຍ້າຍໄດ້ຢ່າງເສລີ ແລະ ຫຼຸດຜ່ອນການເສຍສະລະໃຫ້ໜ້ອຍທີ່ສຸດ.
ອຸປະກອນກວດຫາການເຄື່ອນທີ່ຂອງລູກສູບຖືກຈັດລຽງລະຫວ່າງຖານ ແລະບ່ອນເຮັດວຽກ, ແລະກອບການສ້ອມແຊມແມ່ນເຊື່ອມຕໍ່ກັບຖານດ້ວຍສະກູ, ເຊິ່ງມີການຕິດຕັ້ງເຄື່ອງວັດແທກຂະໜາດ ແລະຂີດຈຳກັດດ້ານເທິງຂອງກະບອກນ້ຳມັນ.
6.2 ແຫຼ່ງນ້ຳມັນ ແລະ ຫຼັກການໄຮໂດຼລິກ
ແຫຼ່ງນ້ຳມັນປະກອບດ້ວຍຖັງນ້ຳມັນ, ໜ່ວຍປ້ຳນ້ຳມັນ, ເຄື່ອງກອງນ້ຳມັນແຮງດັນສູງ, ປ່ຽງສົ່ງນ້ຳມັນ, ປ່ຽງການບັນເທົາທຸກ, ປ່ຽງກັບແມ່ເຫຼັກໄຟຟ້າ, ປ່ຽງສັດສ່ວນ, ແລະອື່ນໆ.
ຫຼັກການໄຮໂດລິກຂອງແຫຼ່ງນໍ້າມັນ (ເບິ່ງຮູບ 3):
ຜົນຜະລິດນ້ຳມັນໄຮໂດຼລິກຂອງໜ່ວຍມໍເຕີປ້ຳນ້ຳມັນຈະເຂົ້າສູ່ປ່ຽງປ່ຽງຜ່ານຕົວກອງນ້ຳມັນທີ່ມີຄວາມກົດດັນສູງ, ແລະອັດຕາການໄຫຼຂອງປ່ຽງສັດສ່ວນສາມາດຄວບຄຸມໄດ້ໂດຍຄອມພິວເຕີເພື່ອຮັບຮູ້ລູກສູບໄປໜ້າ, ຖອຍຫຼັງ ແລະຄວາມໄວໃນການໂຫຼດ, ແລະ ຮັບຮູ້ການບໍາລຸງຮັກສາການໂຫຼດ. ໄປໜ້າໄວ ແລະ ຖອຍຫຼັງໄວສາມາດຮັບຮູ້ການເຄື່ອນທີ່ໄວຂອງກະບອກສູບໄດ້ (ຢ່າໃຊ້ຟັງຊັນນີ້ໃນເວລາເຮັດການທົດລອງ) (ຕາມຮູບ)
7. ສ່ວນການວັດແທກ ແລະການຄວບຄຸມ
ຕົວຄວບຄຸມ SmartTest ແລະລະບົບການຮັບຂໍ້ມູນ ແລະປະມວນຜົນ
(ຕົວຄວບຄຸມດ້ວຍເທັກໂນໂລຍີການສ້ອມແປງ, ໃສ່ໃນ PC)

ຕົວຄວບຄຸມ SmartTest ທີ່ຜະລິດເອງ ແລະລະບົບການຫາຂໍ້ມູນ ແລະປະມວນຜົນຂອງບໍລິສັດພວກເຮົານຳໃຊ້ກະດານຄອມພິວເຕີ ແລະເທັກໂນໂລຍີການອອກແບບບັດ, ເຊິ່ງບໍ່ຕ້ອງການຕົວຄວບຄຸມລະດັບປານກາງ, ເຮັດໃຫ້ການນຳໃຊ້ຊັບພະຍາກອນຮາດແວ ແລະຊອບແວຂອງລະບົບ PC ເຕັມຮູບແບບ, ຫຼຸດຜ່ອນ ສາຍເຊື່ອມຕໍ່ພອດການສື່ສານພາຍນອກ, ຮັບຮູ້ການຄວບຄຸມໂດຍກົງຂອງລະບົບການທົດສອບໂດຍຄອມພິວເຕີ, ແລະປັບປຸງຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມແລະປະສິດທິພາບການຄວບຄຸມຂອງຕົວຄວບຄຸມ. ຄວາມຫມັ້ນຄົງແລະຄວາມຫນ້າເຊື່ອຖືຂອງຕົວຄວບຄຸມໄດ້ຖືກປັບປຸງຢ່າງຫຼວງຫຼາຍ. ເຄື່ອງຄວບຄຸມ TTEST ແລະລະບົບການຫາຂໍ້ມູນແລະການປະມວນຜົນໄດ້ຖືກກວດສອບໂດຍການທົດສອບຕົວຢ່າງພາກສະຫນາມທີ່ດໍາເນີນໂດຍອົງການປົກຄອງແຫ່ງຊາດຕາມຂໍ້ກໍານົດດ້ານວິຊາການ Metrology ແຫ່ງຊາດຂອງສາທາລະນະລັດປະຊາຊົນຈີນ JJF1103-2003 «ເຄື່ອງທົດສອບ Universal ການປະເມີນລະບົບຂໍ້ມູນຄອມພິວເຕີ»ມາດຕະຖານ, ແລະຕົວຊີ້ວັດດ້ານວິຊາການສາມາດບັນລຸລະດັບກ້າວຫນ້າຂອງຜູ້ຄວບຄຸມພາຍໃນທີ່ຄ້າຍຄືກັນ. ມັນໄດ້ຖືກຍົກຍ້ອງໂດຍຜູ້ຊ່ຽວຊານເປັນລະດັບສູງສຸດຂອງລະບົບການວັດແທກແລະການຄວບຄຸມເຄື່ອງທົດສອບໃນປະເທດຈີນ.
4 ເຄື່ອງທົດສອບ servo electro-hydraulic ມືອາຊີບລະບົບການວັດແທກທົ່ວໄປ ແລະລະບົບຊອບແວຄວບຄຸມ
ຄຸນສົມບັດທາງວິຊາການຫຼັກຂອງຊອບແວ:
ລະບົບປະຕິບັດການ windowsXP/2000 ເປັນແພລະຕະຟອມ, ການໂຕ້ຕອບການດໍາເນີນງານຂອງຈີນທັງຫມົດ, ກໍານົດການຄວບຄຸມແບບປິດຂອງ servo electro-hydraulic ດິຈິຕອນຢ່າງເຕັມທີ່, ການປະມວນຜົນຂໍ້ມູນ, ການວິເຄາະຂໍ້ມູນໃນຫນຶ່ງ. ຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຜິດປົກກະຕິ, ການຍ້າຍອອກ, ຄວາມກົດດັນແລະຄວາມເມື່ອຍລ້າແລະຟັງຊັນການຄວບຄຸມ loop ເປີດ / ປິດອື່ນໆ, ຮູບແບບການຄວບຄຸມສາມາດປ່ຽນໄດ້ໂດຍບໍ່ເສຍຄ່າ, ຂໍ້ມູນການທົດສອບ, ອັດຕາການໂຫຼດ, ການຍ້າຍລູກສູບແລະຄວາມຫລາກຫລາຍຂອງເສັ້ນໂຄ້ງການທົດສອບໂດຍຫນ້າຈໍຄອມພິວເຕີສະແດງເວລາຈິງ, ການປຸງແຕ່ງຂໍ້ມູນອັດຕະໂນມັດ, ແລະມີຫນ້າທີ່ການດໍາເນີນງານໄຟລ໌ທີ່ສົມບູນ. ລະບົບການຄວບຄຸມແມ່ນສະຫນັບສະຫນູນໂດຍລະບົບຊອບແວແລະງ່າຍທີ່ຈະຍົກລະດັບ. ຮອງຮັບເຄື່ອງພິມການຄ້າທຸກປະເພດ.
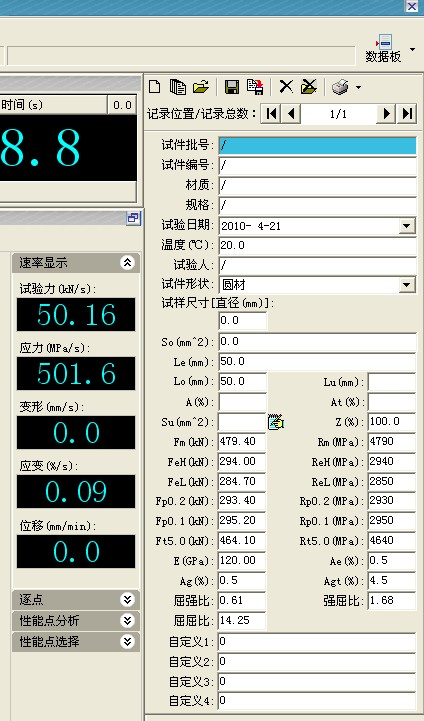
ໜ້າຈໍຫຼັກຂອງຊອບແວ SmartTest ແມ່ນສະແດງຢູ່ໃນຮູບຫຼັງຈາກທີ່ມັນເລີ່ມຂຶ້ນ.
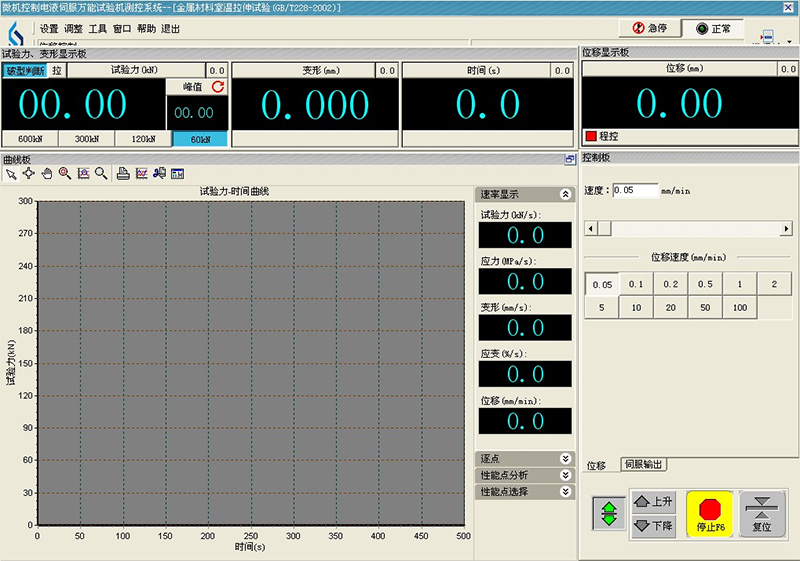
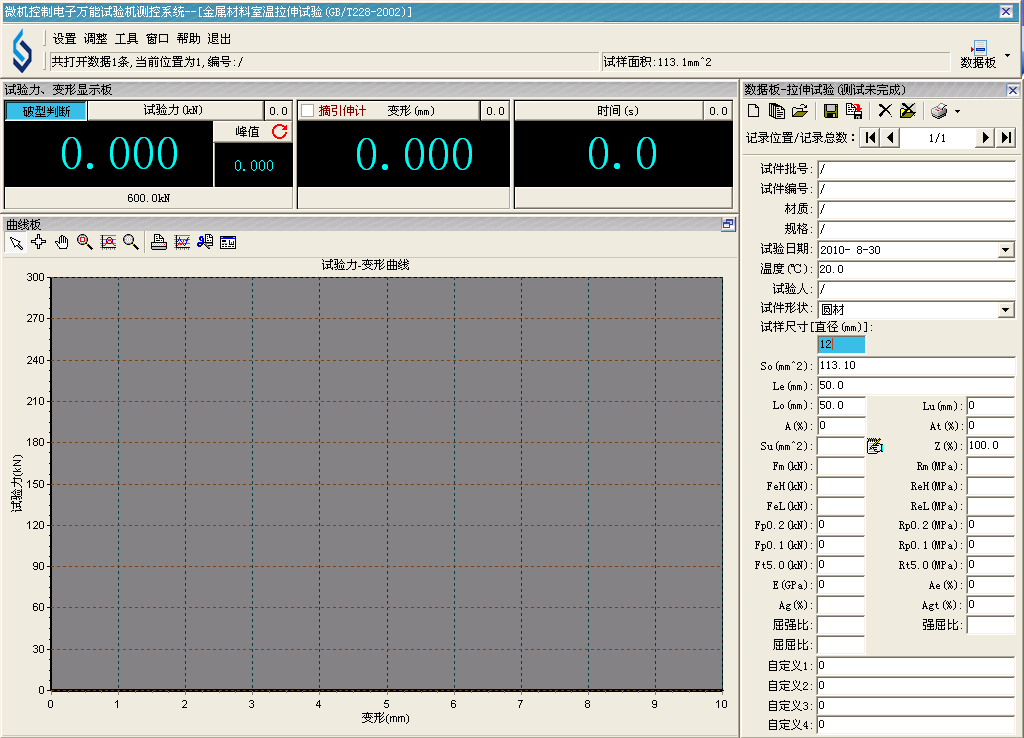
ການໂຕ້ຕອບຕົ້ນຕໍຂອງການປະຕິບັດການທົດສອບແມ່ນສູນຄວບຄຸມຂອງໂປລແກລມ, ເຊິ່ງຮັບຜິດຊອບໃນການຈັດການ Windows ທີ່ເປັນປະໂຫຍດຕ່າງໆ, ແລະການທົດສອບ, ການປະມວນຜົນຂໍ້ມູນແລະການດັດແກ້ທີ່ຄວບຄຸມໂດຍໂຄງການແມ່ນທັງຫມົດໃນການໂຕ້ຕອບນີ້. ມັນປະກອບມີສີ່ພາກສ່ວນ: ເມນູຕົ້ນຕໍ, ໂມດູນການສະແດງ, ກະດານຫນ້າທີ່ແລະໂມດູນການຄວບຄຸມ.
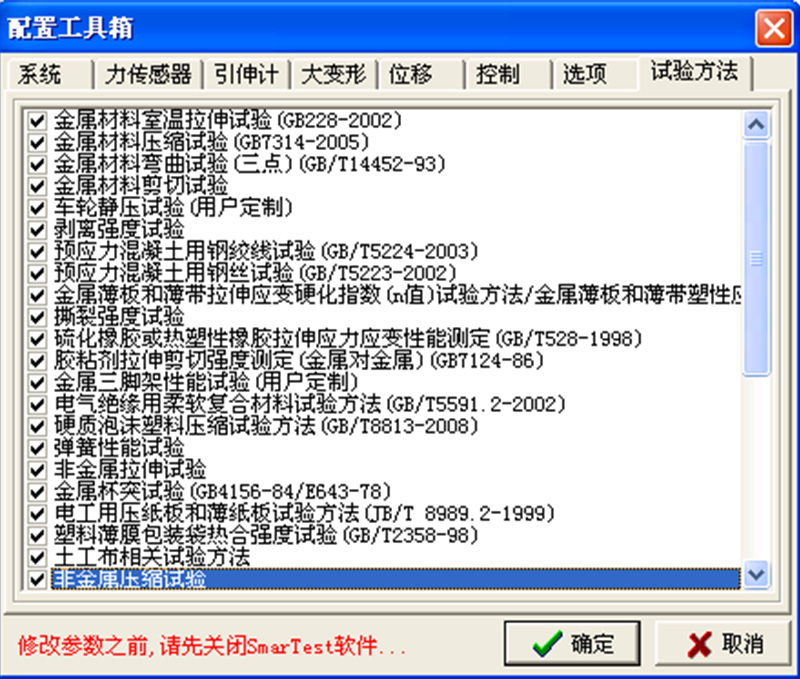
ສະບັບຂໍ້ມູນ
ໃນປັດຈຸບັນຊອບແວຄວບຄຸມໄດ້ປະສົມປະສານເກືອບ 200 ປະເພດຂອງມາດຕະຖານແຫ່ງຊາດຫຼືວິທີການທົດສອບ, ດັ່ງນັ້ນມາດຕະຖານແຫ່ງຊາດຈໍານວນຫຼາຍສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງລູກຄ້າໃນການທົດສອບຕ່າງໆ, ວິທີການທົດສອບສາມາດປັບແຕ່ງແລະປັບປຸງໄດ້ທຸກເວລາຕາມຄວາມຕ້ອງການຂອງລູກຄ້າ, ເຊິ່ງສາມາດນໍາເອົາຄວາມສະດວກອັນໃຫຍ່ຫຼວງໃຫ້ແກ່ລູກຄ້າ.
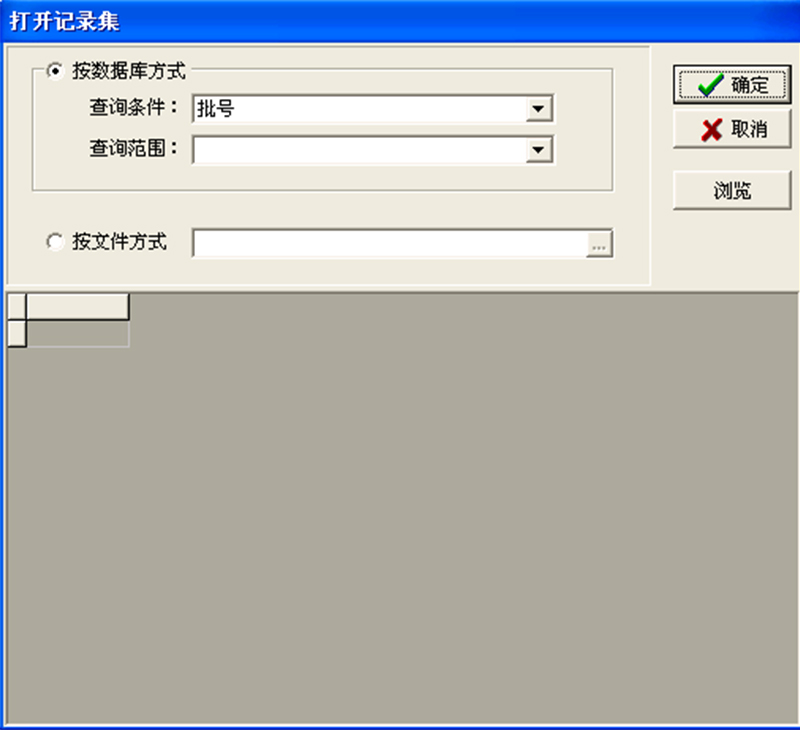
ປ່ອງຢ້ຽມສອບຖາມຂໍ້ມູນ
ທີ່ນີ້ທ່ານສາມາດສອບຖາມຂໍ້ມູນການທົດສອບປະຫວັດສາດໃນຖານຂໍ້ມູນ, ພຽງແຕ່ໃສ່ເງື່ອນໄຂບາງຢ່າງ, ທ່ານສາມາດຊອກຫາຂໍ້ມູນການທົດສອບໄດ້ທັນທີ.
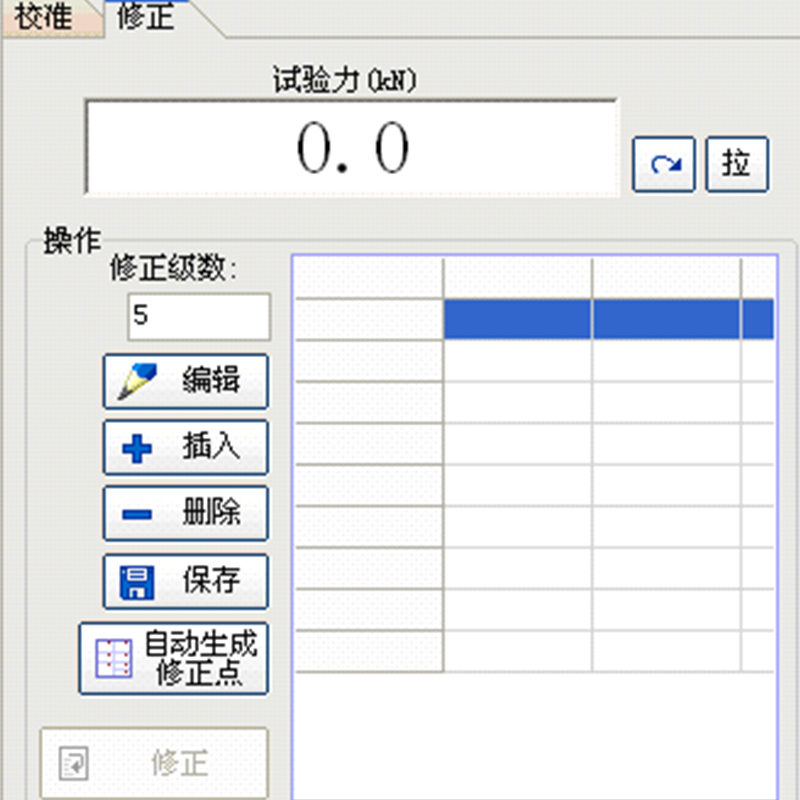
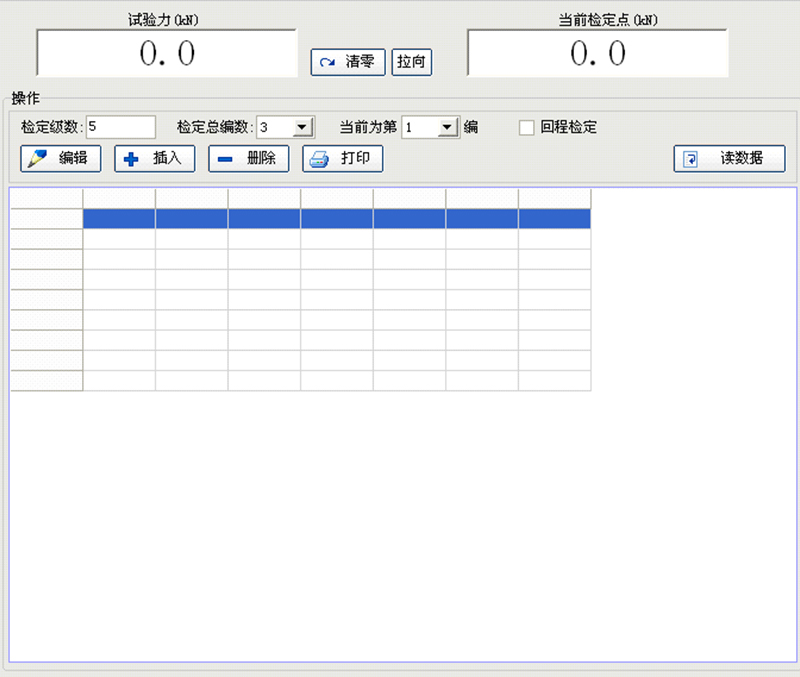
6) ໜ້າຈໍການປັບປ່ຽນ, ການແກ້ໄຂ ແລະການກວດສອບ
ຄ່າບັງຄັບແລະການປ່ຽນຮູບສາມາດຖືກປັບ, ແກ້ໄຂ ແລະກວດສອບໄດ້.

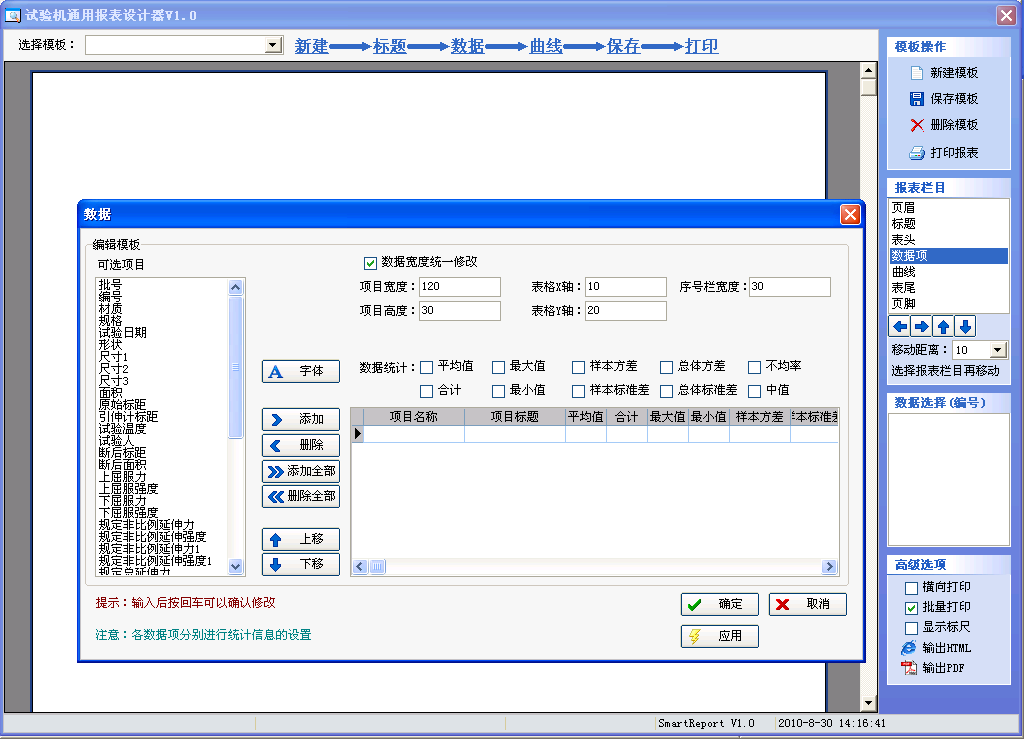
7) ການປະມວນຜົນຂໍ້ມູນເປັນຊຸດ ແລະໜ້າຕ່າງການພິມລາຍງານເປັນຊຸດ
ທີ່ນີ້, batch ຂອງຕົວຢ່າງທີ່ຄ້າຍຄືກັນສາມາດສະຫຼຸບແລະວິເຄາະ, ຂໍ້ມູນການວັດແທກແລະການຄວບຄຸມສາມາດປຽບທຽບແລະຄ່າສະເລ່ຍການຄິດໄລ່, ແລະຕົວຢ່າງສາມາດສະຫຼຸບແລະພິມອອກເປັນຊຸດ.

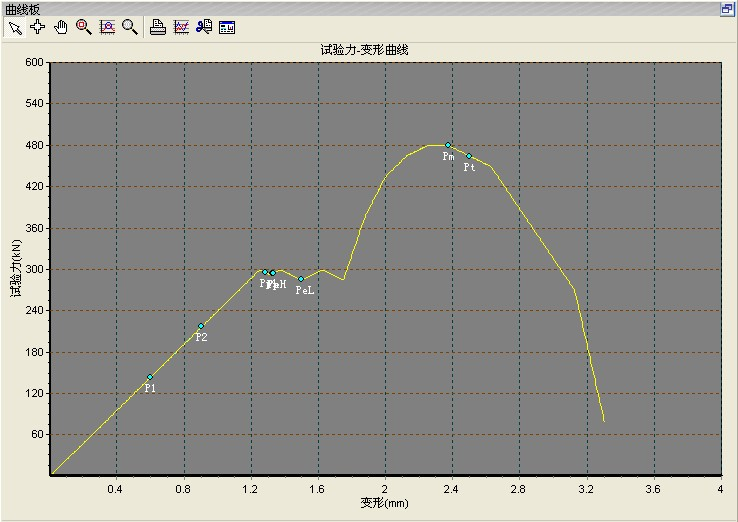
ເສັ້ນໂຄ້ງ ແລະຂໍ້ມູນຜົນໄດ້ຮັບ
ໃນລະຫວ່າງການທົດສອບ, ຫົກປະເພດຂອງເສັ້ນໂຄ້ງລວມທັງການເຄື່ອນຍ້າຍ, ເວລາ, ຜົນບັງຄັບໃຊ້, ການເຄື່ອນຍ້າຍຂອງຜົນບັງຄັບໃຊ້, ຄວາມກົດດັນ, ການບັງຄັບ, ການປ່ຽນຮູບແບບແລະການປ່ຽນຮູບແບບ-time ແມ່ນໄດ້ຮັບການແຕ້ມພ້ອມກັນໂດຍອີງຕາມຂໍ້ມູນທີ່ເກັບກໍາໄດ້, ແລະສາມາດໄດ້ຮັບການສະຫຼັບໂດຍຕົນເອງລະຫວ່າງ ເສັ້ນໂຄ້ງທີ່ແຕກຕ່າງກັນ
7.1 ອະໄຫລ່ໄຟຟ້າ
ອົງປະກອບໄຟຟ້າ:
ພາກສ່ວນໄຟຟ້າປະກອບດ້ວຍລະບົບຄວບຄຸມແລະລະບົບການວັດແທກຈໍສະແດງຜົນ, ແລະລະບົບການວັດແທກການໂຫຼດແມ່ນປະກອບດ້ວຍເຊັນເຊີຄວາມກົດດັນຄວາມແມ່ນຍໍາສູງ, ເຄື່ອງຂະຫຍາຍສຽງ, ເຄື່ອງແປງ A/D, ການສະຫນອງແຮງດັນໄຟຟ້າ, ແລະອື່ນໆ. ການຄວບຄຸມທັງຫມົດ ຕົວກໍານົດການແລະການວັດແທກຜົນໄດ້ຮັບສາມາດສະແດງໃນເວລາທີ່ແທ້ຈິງໃນຫນ້າຈໍ LCD ຂະຫນາດໃຫຍ່. ແລະມີຫນ້າທີ່ປ້ອງກັນການໂຫຼດເກີນ.
ກະດານໄຟຟ້າທີ່ເຂັ້ມແຂງແລະກະດານເຄື່ອງຂະຫຍາຍການວັດແທກໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນເຄື່ອງຕົ້ນຕໍ, ແລະເຊື່ອມຕໍ່ກັບເຄື່ອງຈັກຕົ້ນຕໍ, ເຄື່ອງຂະຫຍາຍການວັດແທກແລະແຫຼ່ງນ້ໍາມັນຜ່ານຕົວເຊື່ອມຕໍ່ເພື່ອສໍາເລັດການສົ່ງພະລັງງານແລະສັນຍານ. (ເບິ່ງຄູ່ມືຊອບແວສຳລັບລາຍລະອຽດ)
ກະດານແຮງດັນສູງ ແລະແຜນວາດລະບົບບລັອກ
ແຜນວາດລະບົບບລັອກ (ເບິ່ງຮູບ 5)
7.2 ອຸປະກອນຄວາມປອດໄພ
7.2.1 ເມື່ອລູກສູບເຄື່ອນຍ້າຍໄປທີ່ຕຳແໜ່ງຈຳກັດ, ມໍເຕີຂອງປ້ຳນ້ຳມັນຫຼັກຈະຖືກຢຸດໂດຍອັດຕະໂນມັດ. ເມື່ອຄວາມກົດດັນຂອງລະບົບສູງເກີນໄປ, ທໍ່ສົ່ງຄວາມກົດດັນພາຍໃນແຫຼ່ງນ້ໍາມັນຈະຕັດອັດຕະໂນມັດເພື່ອບັນລຸການປົກປ້ອງ
7.2.2 ເມື່ອການໂຫຼດເກີນ 2%-5% ຂອງແຮງທົດສອບສູງສຸດ, ການທົດສອບຈະຖືກຢຸດໂດຍອັດຕະໂນມັດ.
7.3 ອຸປະກອນເສີມເຄື່ອງທົດສອບ
ຕິດກັບການທົດສອບຄວາມດັນຕ່ອງໂສ້ສະມໍ.
8. Hoisting and storage
ອຸປະກອນການຍົກຂອງເຄື່ອງທົດສອບຄວນໄດ້ຮັບການເລືອກຕາມປະລິມານແລະນ້ໍາຫນັກຂອງມັນ, ແລະອຸປະກອນການຍົກຄວນຈະຖືກປະຕິບັດຕາມຈຸດສູນກາງຂອງແຮງໂນ້ມຖ່ວງແລະຕໍາແຫນ່ງຍົກທີ່ມີເຄື່ອງຫມາຍຢູ່ໃນກ່ອງບັນຈຸ. ມັນສາມາດຖືກຂົນສົ່ງໂດຍທາງລົດໄຟແລະທາງ. ເຄື່ອງທົດສອບຄວນຖືກວາງໄວ້ໃນສະພາບແວດລ້ອມທີ່ແຫ້ງແລ້ງແລະລະບາຍອາກາດ.
9. ການຕິດຕັ້ງ ແລະປັບປ່ຽນ
9.1 ເງື່ອນໄຂການຕິດຕັ້ງ
ເຄື່ອງທົດສອບຄວນຕິດຕັ້ງຢູ່ໃນຫ້ອງທີ່ສະອາດ, ແຫ້ງ, ບໍ່ມີແຮງສັ່ນສະເທືອນ ແລະ ອຸນຫະພູມທີ່ເໝາະສົມ. ຕໍາແຫນ່ງຂອງເຄື່ອງຈັກຕົ້ນຕໍ, ຕູ້ຄວບຄຸມໄຟຟ້າແລະແຫຼ່ງນ້ໍາມັນຂອງເຄື່ອງທົດສອບຄວນໄດ້ຮັບການກໍານົດຕາມຮູບແຕ້ມຂອງເຄື່ອງຈັກໃນການທົດສອບແລະການວາງພື້ນຖານ. ຍົນດ້ານເທິງຂອງພື້ນຖານຄວນຈະຮາບພຽງແລະວາງລະດັບທີ່ມີລະດັບ. ຫຼັງຈາກພື້ນຖານແຫ້ງ, ຕິດຕັ້ງເຄື່ອງທົດສອບ.
9.2 ການຕິດຕັ້ງໂຮສ
ເຄື່ອງທົດສອບແລະແຫຼ່ງນ້ໍາມັນຖືກຂົນສົ່ງຕາມລໍາດັບໄປສູ່ຖານຄອນກີດ, ແລະໄລຍະຫ່າງແລະທິດທາງລະຫວ່າງເຄື່ອງຈັກຕົ້ນຕໍແລະແຫຼ່ງນ້ໍາມັນແມ່ນຖືກກໍານົດຕາມຮູບແຕ້ມຮູບຮ່າງແລະຮູບແຕ້ມພື້ນຖານ (ເບິ່ງຮູບ 6) ແລະຂະຫນາດຂອງ ທໍ່. ຫຼັງຈາກນັ້ນ, ແຜ່ນບາງໆຖືກໃສ່ລະຫວ່າງດ້ານລຸ່ມຂອງເຄື່ອງຈັກຕົ້ນຕໍແລະພື້ນຖານ. ຫຼັງຈາກນັ້ນ, ນໍາໃຊ້ລະດັບ 0.05/1000 ຮຽບຮ້ອຍສໍາລັບການສອດຄ່ອງ, ວາງລະດັບສີ່ຫຼ່ຽມມົນໃສ່ດ້ານນອກຂອງກະບອກ, ແລະຊອກຫາແນວຕັ້ງຂອງມັນທັງສອງດ້ານຕັ້ງຂວາງກັບກັນແລະກັນ. perpendicularity ຂອງມັນບໍ່ຄວນຈະຫຼາຍກ່ວາ 0.2/1000. ຫຼືວາງລະດັບແຖບໃສ່ໂຕະເຮັດວຽກ, ຊອກຫາລະດັບຂອງມັນ, ລະດັບຄວາມສູງບໍ່ຄວນສູງກວ່າ 0.2/1000.
ຫຼັງຈາກເຄື່ອງທົດສອບໄດ້ພົບເຫັນແລ້ວ, ໜວດສະມໍຖືກຖອກດ້ວຍນ້ຳລະລາຍ, ແລະເຫລັກເບາະຢູ່ໃຕ້ຖານເຄື່ອງແມ່ນ padded ແຫນ້ນ. ແລະຊ່ອງຫວ່າງພາຍໃຕ້ພື້ນຖານແມ່ນເຕັມໄປດ້ວຍ slurry ນ້ໍາເພື່ອຮັກສາການປະສົມປະສານທີ່ດີຂອງພື້ນຖານແລະພື້ນຖານຊີມັງເພື່ອປ້ອງກັນບໍ່ໃຫ້ເຄື່ອງທົດສອບຢູ່ໃນແນວນອນເນື່ອງຈາກການສັ່ນສະເທືອນໃນລະຫວ່າງການໃຊ້ງານ. ຫຼັງຈາກຖອກໃສ່ໝາກສະຕໍແລ້ວ, ບໍ່ຄວນບີບເຄື່ອງທົດສອບໃຫ້ແໜ້ນ ແລະ ເລີ່ມຕົ້ນເຄື່ອງຈັກຫຼັກດ້ວຍລູກປັດສະມໍ ກ່ອນທີ່ຊີມັງຈະແຫ້ງ (ໂດຍທົ່ວໄປແລ້ວເວລາແຫ້ງຂອງຊີມັງບໍ່ຕໍ່າກວ່າ 10 ຫາ 15 ມື້). ຫຼັງຈາກຊີມັງແຫ້ງແລ້ວ, ແກ້ໄຂເຄື່ອງທົດສອບເທິງພື້ນຖານດ້ວຍ bolts ສະມໍ. ກວດເບິ່ງຄວາມຖືກຕ້ອງຂອງການຕິດຕັ້ງເຄື່ອງທົດສອບເພື່ອເບິ່ງວ່າມັນສອດຄ່ອງກັບຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງ. ຖ້າມັນບໍ່ກົງກັນ, ແກ້ໄຂມັນອີກເທື່ອຫນຶ່ງ.
9.3 ການເຊື່ອມຕໍ່ທໍ່
ການເຊື່ອມຕໍ່ທໍ່ຄວນຖືກຕິດຕັ້ງໂດຍຜູ້ຊ່ຽວຊານເພື່ອຫຼີກເວັ້ນການອຸດຕັນປ່ຽງ ແລະນໍ້າມັນຮົ່ວເນື່ອງຈາກການເຮັດວຽກຜິດພາດ.
9.4 ການເລືອກນ້ຳມັນໄຮໂດຼລິກ
ນ້ຳມັນໄຮໂດຼລິກຄວນເລືອກນ້ຳມັນໄຮໂດຼລິກ 46# ຕ້ານການສວມໃສ່.
9.5 ການສີດນ້ຳມັນ ແລະ ລົງຂາວ
ເອົາທໍ່ສົ່ງຄືນການລ້າງອອກຢູ່ເໜືອຖັງ ແລະສີດນ້ຳມັນໃສ່ຖັງຜ່ານກອງນ້ຳມັນນີ້. ປະລິມານຂອງນ້ໍາມັນທີ່ຖືກສັກແມ່ນວັດແທກໂດຍເຄື່ອງວັດແທກລະດັບຢູ່ດ້ານຂ້າງ.
ເມື່ອເອົານ້ຳມັນອອກ, ເປີດທໍ່ລະບາຍນ້ຳຢູ່ລຸ່ມຖັງ. ຊີວິດຂອງນ້ໍາມັນແມ່ນຫນຶ່ງປີ. ມັນສາມາດສັ້ນແລະຂະຫຍາຍອອກໄດ້ຢ່າງເຫມາະສົມຕາມສະພາບອາກາດຂອງແຕ່ລະສະຖານທີ່. ຖ້າພົບວ່ານໍ້າມັນເສື່ອມເສຍ ຫຼືເປື້ອນ, ຄວນປ່ຽນນ້ຳມັນໃໝ່.
9.6 ສາຍເຊື່ອມຕໍ່
ອີງຕາມແຜນວາດສາຍໄຟເຊື່ອມຕໍ່ກັນ, ຕູ້ຄວບຄຸມໄຟຟ້າ, ເຄື່ອງຈັກຕົ້ນຕໍ, ແຫຼ່ງນໍ້າມັນ, ແລະຕົວເຊື່ອມຕໍ່ແມ່ນເຊື່ອມຕໍ່ກັນ, ແລະການເຊື່ອມຕໍ່ຄວນຈະຖືກຕ້ອງ, ປອດໄພ, ແລະເຊື່ອຖືໄດ້. (ການສະຫນອງພະລັງງານແມ່ນສາມເຟດ 380, ບວກກັບເສັ້ນສູນ. ນັ້ນແມ່ນ, ລະບົບສາຍຫ້າສາຍສາມເຟດ, ການໃສ່ພື້ນດິນແກະເຄື່ອງ).

9.7 ການຕິດຕັ້ງຕົວຢ່າງ (ເບິ່ງຮູບທີ່ຕິດຄັດມາ)
ກ່ອນທີ່ຈະທົດສອບ, ປັບຕໍາແຫນ່ງຂອງລໍາຄົງທີ່ຕາມຄວາມຍາວຂອງຕົວຢ່າງ, ຫຼັງຈາກນັ້ນດຶງອອກ pin ຄົງທີ່ຢູ່ໃນຮູບຂ້າງເທິງ, ເອົາຕົວຢ່າງເຂົ້າໄປໃນ, ແລະໃສ່ pin ຄົງທີ່ກັບຄືນໄປບ່ອນຕໍາແຫນ່ງເດີມ. ປາຍອື່ນຖືກແກ້ໄຂດ້ວຍວິທີດຽວກັນ
9.8 ຂໍ້ຄວນລະວັງໃນການປະຕິບັດງານ
ກ) ມັນບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ໃຊ້ການໂຫຼດສົ່ງຕໍ່ໄວໃນຕົວຢ່າງ;
b) ລຳດັບໄລຍະມໍເຕີບໍ່ອະນຸຍາດໃຫ້ໂດດ, (ປ້ຳນ້ຳມັນເສຍຫາຍຂອງເຄື່ອງຈັກ.
c) ກຳນົດຕຳແໜ່ງຈຳກັດກ່ອນການທົດສອບ.
d) ບໍ່ມີການດໍາເນີນການໃນເວລາທີ່ເປີດໄຟ, ກະລຸນາຢືນຢັນ: 1. ແຕະທີ່ຈໍາກັດ. 2 ບໍ່ວ່າຈະມີການຕັດຟິວໃນຕູ້ຄວບຄຸມໄຟຟ້າ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ
e) ຫຼັງຈາກປ່ຽນອົງປະກອບໄຟຟ້າ ຫຼືການທົດສອບແລ້ວ, ກະລຸນາປິດສະວິດ ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ
f) ລະບົບຖືກຄວບຄຸມໂດຍໄມໂຄຄອມພິວເຕີ. ກະລຸນາຢ່າຕິດຕັ້ງ U disk ຫຼືຊອບແວທີ່ບໍ່ຮູ້ຈັກໃນຄອມພິວເຕີຂອງອຸປະກອນໃນເວລາທີ່ອຸປະກອນແມ່ນເຮັດວຽກປົກກະຕິ, ເພື່ອປ້ອງກັນການທໍາລາຍຂອງໄວຣັສກັບໄຟລ໌ລະບົບ. ກະລຸນາເຮັດການສໍາຮອງໃນລະຫວ່າງການນໍາໃຊ້ປົກກະຕິ. ປ້ອງກັນບໍ່ໃຫ້ຊອບແວທົດສອບບໍ່ສາມາດໃຊ້ໄດ້ເມື່ອລະບົບຖືກຕິດຕັ້ງຄືນໃໝ່.
10. ການບຳລຸງຮັກສາ ແລະ ບຳລຸງຮັກສາ
10.1 ອົງປະກອບຂອງເຄື່ອງທົດສອບຄວນຖືກເຊັດເລື້ອຍໆເພື່ອປ້ອງກັນການເກີດຂີ້ໝ້ຽງ.
10.2 ຄວນປ່ຽນນ້ຳມັນໄຮໂດຼລິກເປັນປະຈຳ.
10.3 ມັນບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ຖອດປະກອບແຫຼ່ງນ້ຳມັນ ແລະທໍ່ສົ່ງຕາມໃຈປະສົງ. ຖ້ານ້ໍາມັນຮົ່ວໄຫຼແລະປະທັບຕາຖືກປ່ຽນແທນ, ຈົ່ງເອົາໃຈໃສ່ກັບການເຮັດຄວາມສະອາດທໍ່. ວຽກງານນີ້ຄວນຈະຖືກປະຕິບັດໂດຍຜູ້ຊ່ຽວຊານເພື່ອຫຼີກເວັ້ນການຂັດຂວາງປ່ຽງຫຼືຂູດລູກສູບຂອງກະບອກ, ເຊິ່ງຈະສົ່ງຜົນກະທົບຕໍ່ການນໍາໃຊ້ປົກກະຕິຂອງເຄື່ອງທົດສອບ.
11. ຄວາມຜິດທົ່ວໄປ ແລະວິທີການແກ້ໄຂບັນຫາ
ການຮົ່ວໄຫຼຂອງນໍ້າມັນເກີດຂຶ້ນໃນທໍ່ທໍ່
ວິທີກຳຈັດ: ທຳອິດໃຫ້ຖິ້ມລູກສູບກັບໄປໃສ່ລຸ່ມຂອງກະບອກສູບ, ປິດປ້ຳນ້ຳມັນ ແລະ ການສະໜອງພະລັງງານ, ແລະ ຮັດຂໍ້ຕໍ່ດ້ວຍມື. ຖ້ານ້ຳມັນຍັງຮົ່ວ, ໃຫ້ປ່ຽນປະທັບຕາປະສົມ ຫຼື O-ring.
12. ລາຍການການຕັ້ງຄ່າລະບົບ
1. ລະບົບໂຮດ:
1.1. ກະບອກສູບແຮງບິດຕ່ຳແບບກະບອກດຽວ rod double action
ການປະທັບຕາທີ່ນໍາເຂົ້າຖືກນໍາໃຊ້ເພື່ອປະທັບຕາ, ປະທັບຕາຢ່າງຫນ້າເຊື່ອຖື, ໃຊ້ກ້ຽງ, ແລະຮັບປະກັນຊີວິດການບໍລິການຂອງກະບອກໄຮໂດຼລິກ.
1.2. ບ່ອນນັ່ງກະບອກສູບ
1.3. ຍ້າຍລໍາ
1.4. ບ່ອນນັ່ງ chuck ຫນ້າແລະຫລັງ
1.5. ກອບຫຼັກ (ໂຄງສ້າງການເຊື່ອມໂລຫະແຜ່ນເຫຼັກ)
1.6. ອຸປະກອນເສີມຫົວບານບີບອັດ (ການປັບຂໍ້ມູນ)
2. ຄວບຄຸມແຫຼ່ງນໍ້າມັນ
1. ແຫຼ່ງນ້ຳມັນປະສົມປະສານ electro-hydraulic servo ອັນໜຶ່ງ (ຮວມທັງວາວເຊີໂວໄຟຟ້າ-ໄຮໂດຼລິກ)
2, ຊຸດຂອງລະບົບການຍຶດໄຮໂດຼລິກ (ທາງເລືອກຖ້າແມ່ຂ່າຍຖືກຍຶດດ້ວຍມື, ມັນບໍ່ໄດ້ລວມເອົາອັນນີ້)
3. ທົດສອບຊິ້ນສ່ວນຂອງຕົວຄວບຄຸມ ST8800 (ໃສ່ໃນ PC)
4, ເຄື່ອງທົດສອບ servo electro-hydraulic ການວັດແທກທົ່ວໄປ ແລະຊອບແວຄວບຄຸມ (CD ສຳຮອງ) ຊຸດ
5, ຊຸດລະບົບໄຟຟ້າ
6, ເຊັນເຊີຄວາມດັນ
7. ຕົວຂະຫຍາຍເອເລັກໂຕຣນິກ
8. ຊຸດຂອງເຊັນເຊີ photoelectric displacement sensor
9. ຊຸດຂອງ tees, ສາຍ ແລະຕົວເຊື່ອມຕໍ່ທີ່ກ່ຽວຂ້ອງກັບການຫັນປ່ຽນ
10, ຄູ່ມືເອເລັກໂຕຣນິກ (ຊອບແວ CD-ROM) ຊຸດ
11, ເຄື່ອງພິມຄອມພິວເຕີ ແລະເຄື່ອງພິມສີ
ອື່ນໆ
6.1. ລະບົບປະຈຸບັນທີ່ເຂັ້ມແຂງ: ຊຸດດຽວ
ຄອນໂຊໄຟຟ້າເດັສທັອບ
6.2. ສາຍແລະສາຍ, ອຸປະກອນຊ່ວຍ, ແລະອື່ນໆ.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese





















