1. ການແນະນຳຜະລິດຕະພັນ
WAW-D microcomputer controlled electro-hydraulic servo machine testing universal is Ji 'nan Kehui Company in the original B machine on the ພື້ນຖານການຍົກລະດັບແລະການປັບປຸງຂອງຮູບແບບກາງ, ຮຽນຮູ້ B-machine ການຜະລິດໃນໄລຍະຍາວ. ປະສົບການແລະປະສົບການຄວາມຄິດເຫັນຂອງລູກຄ້າ, ດັ່ງນັ້ນການປະຕິບັດແລະຄວາມຫມັ້ນຄົງຂອງມັນໄດ້ຖືກປັບປຸງຢ່າງຫຼວງຫຼາຍ, ຫຼຸດຜ່ອນອັດຕາການລົ້ມເຫຼວ. ໃນການຄົ້ນຄວ້າຕະຫຼາດທ້າຍຍັງໄດ້ຍົກໃຫ້ເຫັນຢ່າງເຕັມສ່ວນຜົນປະໂຫຍດດ້ານການປະຕິບັດຄ່າໃຊ້ຈ່າຍຂອງເຄື່ອງຈັກປະເພດ D, ເຊິ່ງໄດ້ຮັບຄວາມນິຍົມຈາກລູກຄ້າກາງ.
ເຄື່ອງທົດສອບນີ້ແມ່ນເຄື່ອງມືແລະອຸປະກອນທີ່ສໍາຄັນສໍາລັບການທົດສອບຄຸນສົມບັດທາງກາຍະພາບ, ຄຸນສົມບັດກົນຈັກ, ຄຸນສົມບັດຂອງຂະບວນການ, ຄວາມແຂງແຮງຂອງແຜ່ນດິນໄຫວຂອງໂຄງສ້າງແລະຂໍ້ບົກພ່ອງພາຍໃນແລະພາຍນອກຂອງວັດສະດຸແລະອົງປະກອບຂອງວັດສະດຸແລະຜະລິດຕະພັນຕ່າງໆໃນສະພາບແວດລ້ອມຕ່າງໆແລະສະຖານະການຈໍາລອງ. ຄວາມເຂັ້ມແຂງ tensile, ຄວາມເຂັ້ມແຂງຜົນຜະລິດ, ຄວາມເຂັ້ມແຂງການຂະຫຍາຍທີ່ບໍ່ແມ່ນອັດຕາສ່ວນ, modulus elastic ແລະຕົວຊີ້ວັດການປະຕິບັດອື່ນໆຂອງອຸປະກອນການວັດແທກສາມາດໄດ້ຮັບຕາມມາດຕະຖານທີ່ສອດຄ້ອງກັນ, ແລະການຄວບຄຸມວົງປິດເຊັ່ນ: ການໂຫຼດອັດຕາເທົ່າທຽມກັນ, ການຜິດປົກກະຕິອັດຕາເທົ່າທຽມກັນ, ການຍ້າຍອັດຕາເທົ່າທຽມກັນ. ແລະຄວາມເຄັ່ງຕຶງອັດຕາເທົ່າທຽມກັນສາມາດຮັບຮູ້ໄດ້. ຂະບວນການທົດສອບຄຸນສົມບັດຂອງວັດສະດຸຫຼືຜະລິດຕະພັນສາມາດດໍາເນີນການໄດ້.

2. ຮູບແບບສະເພາະ: WA-600C
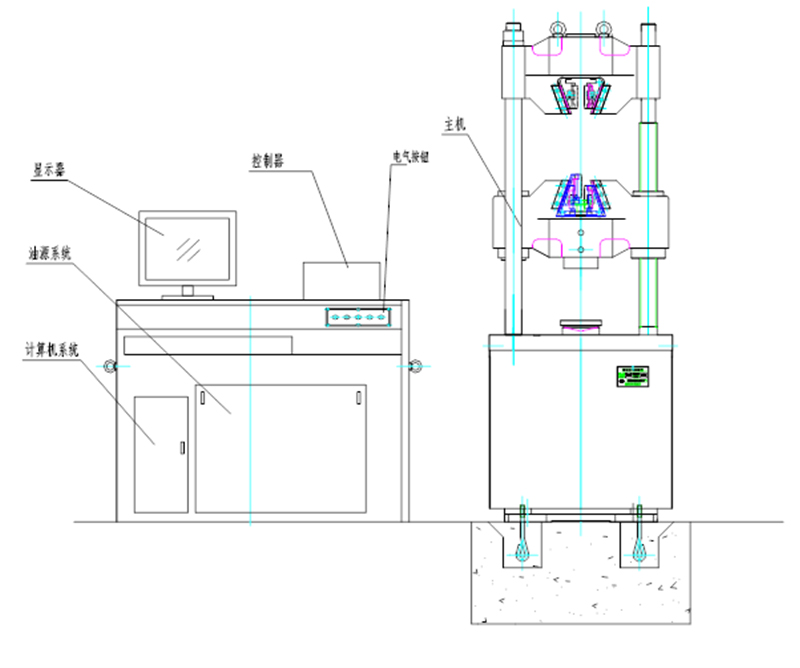
ແຜນວາດເຄື່ອງຄົບ
3. ມາດຕະຖານນຳໃຊ້
GB/T 2611-2007 "ຄວາມຕ້ອງການດ້ານວິຊາການທົ່ວໄປສໍາລັບເຄື່ອງທົດສອບ"
JB/T 7406.1-1994 ເຄື່ອງທົດສອບຄຳສັບເຄື່ອງທົດສອບວັດສະດຸ
GB/T 16826-2008 "ເຄື່ອງທົດສອບຈັກໄຟຟ້າ-ໄຮໂດຼລິກ servo universal"
GB/T 16825.1-2008 "ການທົດສອບເຄື່ອງທົດສອບ uniaxial static - ພາກທີ 1: ການທົດສອບແລະການປັບທຽບຂອງລະບົບການວັດແທກແຮງດັນສໍາລັບເຄື່ອງທົດສອບຄວາມກົດດັນແລະ / ຫຼືຄວາມກົດດັນ"
GB/T 22066-2008 "ການປະເມີນລະບົບການໄດ້ມາຂໍ້ມູນຄອມພິວເຕີສຳລັບເຄື່ອງທົດສອບ Uniaxial Static"
JJG 139-1999 "ເຄື່ອງທົດສອບແຮງດັນ, ຄວາມກົດດັນ ແລະວັດສະດຸທົ່ວໄປ"
JB/T 6146-2007 "ເງື່ອນໄຂດ້ານວິຊາການ Extensometer"
JB/T 6147-2007 "ການທົດສອບການຫຸ້ມຫໍ່ເຄື່ອງຈັກ, ເຄື່ອງໝາຍການຫຸ້ມຫໍ່, ການເກັບຮັກສາ ແລະຄວາມຕ້ອງການດ້ານເຕັກນິກການຂົນສົ່ງ"
GB/T 228-2010 "ວິທີການທົດສອບແຮງດັນສຳລັບວັດສະດຸໂລຫະ"
GB/T 7314-2005 "ວິທີການທົດສອບການບີບອັດວັດສະດຸໂລຫະທີ່ອຸນຫະພູມຫ້ອງ"
GB/T 232-2010 "ວິທີການທົດສອບການງໍສໍາລັບວັດສະດຸໂລຫະ"
4. ຄຸນສົມບັດຂອງຜະລິດຕະພັນ
1) ເຄື່ອງຈັກຕົ້ນຕໍຮັບຮອງເອົາການອອກແບບທີ່ມີລັກສະນະຄ່ອງຕົວ, ທໍ່ນ້ໍາມັນຖືກວາງໄວ້, ການແຜ່ກະຈາຍຄວາມເຂັ້ມແຂງໃນການອອກແບບຂອງແຕ່ລະອົງປະກອບແມ່ນສົມເຫດສົມຜົນ, ການປະສົມປະສານທັງຫມົດແມ່ນວິທະຍາສາດ, ບັນຍາກາດ, ທີ່ສວຍງາມ, ຂະບວນການສີເອກະລາດ, ແລະຜົນກະທົບຂອງສີແລະສີ. ສາມາດປັບແຕ່ງຕາມຄວາມຕ້ອງການຂອງລູກຄ້າເພື່ອໃຫ້ກົງກັບສະພາບແວດລ້ອມຂອງສະຖານທີ່ລູກຄ້າ;
2) coaxiality ລະຫວ່າງເສັ້ນສູນກາງຂອງ chuck ເທິງແລະຕ່ໍາແລະແກນ tensile ຂອງເຄື່ອງທົດສອບແມ່ນ 8% (ຫຼາຍດີກ່ວາມາດຕະຖານແຫ່ງຊາດຫນ້ອຍກ່ວາ 15%);
3) ການຍຶດເອົາຕົວຢ່າງແມ່ນຂັບເຄື່ອນດ້ວຍລະບົບໄຮໂດຼລິກ. ຝາເທິງແລະລຸ່ມແມ່ນຕິດຕັ້ງດ້ວຍກະບອກນ້ໍາມັນຂະຫນາດນ້ອຍທີ່ຍຶດຫມັ້ນພາຍໃນ, ເຊິ່ງມີຄວາມປອດໄພກວ່າ, ເຊື່ອຖືໄດ້, ຊີວິດທີ່ຍາວນານ, ບໍ່ມີນ້ໍາຮົ່ວໄຫຼແລະຮູບລັກສະນະທີ່ສວຍງາມກວ່າກະບອກ clamping ພາຍນອກ.
4) ແຮງຍຶດຂອງຕົວຢ່າງເພີ່ມຂຶ້ນດ້ວຍການເພີ່ມແຮງທົດສອບ, ແລະຕົວຢ່າງຖືກຍຶດແຫນ້ນ;
5) ລະບົບໄຮໂດຼລິກຮັບຮອງເອົາການຄວບຄຸມ servo ວົງປິດ, ຕິດຕັ້ງດ້ວຍວາວ servo ທີ່ນໍາເຂົ້າທີ່ຕອບສະຫນອງສູງ, ເຊິ່ງສາມາດຮັບຮູ້ການຄວບຄຸມອັດຕະໂນມັດແລະຖືກຕ້ອງ;
6) ການອອກແບບລະບົບໄຮໂດຼລິກພິຈາລະນາຢ່າງເຕັມສ່ວນການປະຫຍັດພະລັງງານ, ຄວາມຫນ້າເຊື່ອຖື, ຄວາມປອດໄພແລະການປົກປ້ອງສິ່ງແວດລ້ອມ. ລະບົບ servo ຄວາມໄວທີ່ແຕກຕ່າງກັນຂອງຄວາມກົດດັນໄດ້ຖືກຮັບຮອງເອົາ, ແລະຄວາມກົດດັນໃນການເຮັດວຽກຂອງລະບົບໄດ້ຖືກປັບໂດຍອັດຕະໂນມັດກັບການປ່ຽນແປງຂອງການໂຫຼດ, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນຄວາມຮ້ອນຂອງລະບົບແລະປະຫຍັດພະລັງງານ. ອົງປະກອບທັງຫມົດແມ່ນເຮັດດ້ວຍອົງປະກອບທີ່ຕອບສະຫນອງຄວາມຕ້ອງການປົກປັກຮັກສາສິ່ງແວດລ້ອມ;
7) ປັ໊ມເກຍແຮງດັນສູງແລະມໍເຕີເຊື່ອມຕໍ່ໂດຍກົງໂຄງສ້າງ, ໂຄງສ້າງທີ່ຫນາແຫນ້ນ, ການດໍາເນີນງານລຽບ, ສຽງຕ່ໍາກວ່າ 70dB;
8) ຄວາມຖືກຕ້ອງຂອງຂະບວນການທົດສອບແລະຕົວກໍານົດການສາມາດຮັບປະກັນໂດຍການບໍ່ໄດ້ຮັບຜົນກະທົບຈາກກໍາລັງພາຍນອກໃນການທົດສອບຫຼັງຈາກການສອບທຽບແບບສຸ່ມ. ເຊັນເຊີທົດສອບແຮງດັນ ແລະ ການບີບອັດມີທິດທາງການບັງຄັບດຽວກັນ. calibration ງ່າຍດາຍແລະສະດວກສະບາຍ;
9) ໃຊ້ທໍ່ທີ່ມີຄວາມກົດດັນສູງທີ່ມີຄຸນນະພາບສູງແລະສ່ວນປະສົມເພື່ອໃຫ້ແນ່ໃຈວ່າບໍ່ມີການຮົ່ວໄຫຼ;
10) ມາພ້ອມກັບຕົວຄວບຄຸມດິຈິຕອນເຕັມຮູບແບບອັດສະລິຍະທີ່ມີປະສິດທິພາບສູງ, ມີລະບຽບ PID ດິຈິຕອລເຕັມຮູບແບບ, ພ້ອມກັບເຄື່ອງຂະຫຍາຍ servo ເອກະລາດ, ຊອບແວການວັດແທກ ແລະການຄວບຄຸມ ແລະຂໍ້ມູນການເກັບຂໍ້ມູນ ແລະຊອບແວການປະມວນຜົນ, ສາມາດຮັບຮູ້ໄດ້ຫຼາກຫຼາຍຮູບແບບການຄວບຄຸມແບບວົງປິດ ເຊັ່ນ: ເທົ່າທຽມ ຜົນບັງຄັບໃຊ້ການທົດສອບອັດຕາ, ການຍ້າຍກະບອກອັດຕາເທົ່າທຽມກັນ, ເມື່ອຍອັດຕາເທົ່າທຽມກັນ, ແລະສາມາດຮັບຮູ້ການປ່ຽນກ້ຽງຂອງຮູບແບບການຄວບຄຸມທີ່ແຕກຕ່າງກັນ;
11) ລະບົບການວັດແທກ ແລະການຄວບຄຸມແມ່ນມີຊຸດຊອບແວທົດສອບຫຼາຍຟັງຊັນ ແລະນຳໃຊ້ເທັກໂນໂລຍີການມາຂໍ້ມູນຄວາມໄວສູງ VXDs ເພື່ອຮັບຮູ້ຂໍ້ມູນທີ່ໄດ້ມາດ້ວຍຄວາມໄວສູງຫຼາຍຊ່ອງ; ມັນສາມາດວິເຄາະແລະປຸງແຕ່ງຜົນການທົດສອບຕາມຄວາມຕ້ອງການຂອງວິທີການທົດສອບທີ່ແຕກຕ່າງກັນ, ມີຫນ້າທີ່ຄວບຄຸມການຂຽນໂປລແກລມແບບໂຕ້ຕອບຂອງມະນຸດ - ຄອມພິວເຕີ, ສະດວກໃນການເພີ່ມມາດຕະຖານການທົດສອບໃຫມ່; ມັນມີຫນ້າທີ່ປະຕິບັດການກາຟິກທີ່ມີປະສິດທິພາບ, ເຊິ່ງສາມາດສະແດງເສັ້ນໂຄ້ງການທົດສອບແລະສະແດງຂໍ້ມູນການທົດສອບໃນເວລາທີ່ແທ້ຈິງ, ແລະມີຫນ້າທີ່ຂອງການຂະຫຍາຍເສັ້ນໂຄ້ງ, ການຂະຫຍາຍກາຟ, ການຂັດຂວາງ, ແລະຕົວກະພິບຕິດຕາມການສະແດງ. ດ້ວຍເສັ້ນໂຄ້ງການທົດສອບທີ່ສົມບູນ, ການທົດສອບການທໍາງານການເກັບຮັກສາຂໍ້ມູນ; ມີຜົນໄດ້ຮັບບົດລາຍງານການທົດສອບດຽວແລະ batch ການທົດສອບຜົນໄດ້ຮັບການທໍາງານການພິມ;
12) ດ້ວຍການໂຕ້ຕອບເຄືອຂ່າຍ, ສາມາດບັນລຸເຄືອຂ່າຍຂໍ້ມູນແລະຟັງຊັນການຄວບຄຸມໄລຍະໄກ;
13) ອຸປະກອນປ້ອງກັນຄວາມປອດໄພ: ມີການທົດສອບແຮງເກີນ, oversetting, power off, piston ກັບຕໍາແຫນ່ງຈໍາກັດແລະຫນ້າທີ່ປ້ອງກັນອື່ນໆ.
5. ໂຄງສ້າງ ແລະປະສິດທິພາບຂອງຜະລິດຕະພັນ:
ເຄື່ອງທົດສອບແມ່ນປະກອບດ້ວຍສີ່ພາກສ່ວນ: ພາກສ່ວນເຄື່ອງຈັກຕົ້ນຕໍ, ພາກສ່ວນແຫຼ່ງນ້ໍາມັນ, ລະບົບການວັດແທກແລະການຄວບຄຸມແລະອຸປະກອນທົດສອບ.
(1) ເຄື່ອງຈັກທົດສອບ
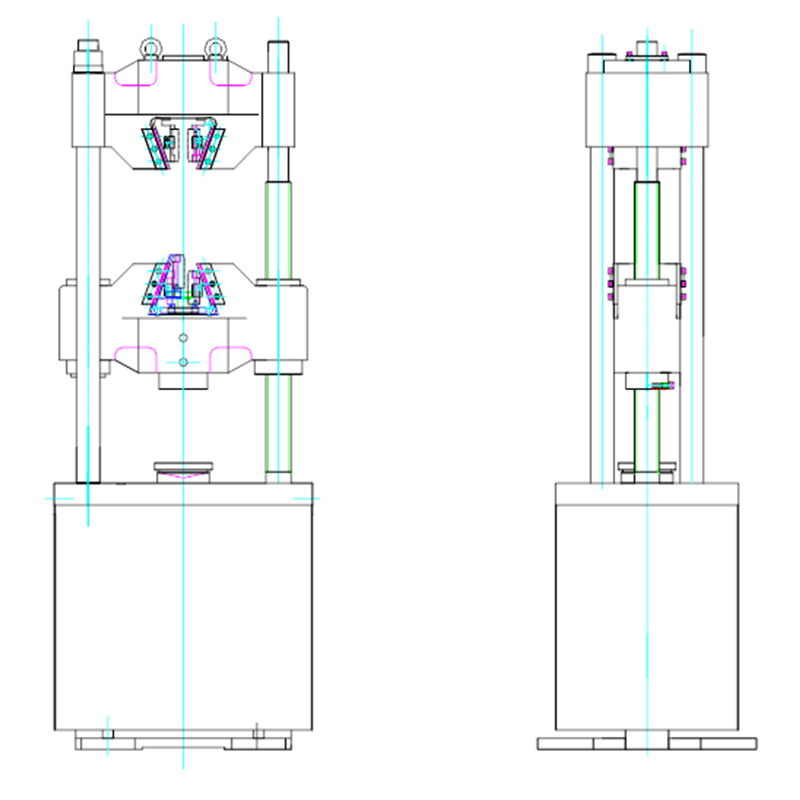
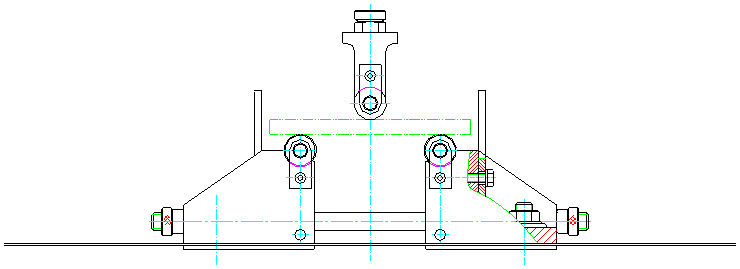
ແຜນວາດເຄື່ອງຈັກຫຼັກ (ດ້ານຂ້າງ)
ໂຄງສ້າງເຈົ້າພາບ:
ເຄື່ອງຈັກຕົ້ນຕໍແມ່ນປະເພດກອບສີ່ຖັນທີ່ມີໂຄງສ້າງພື້ນທີ່ຄູ່ທີ່ມີຖັນຄູ່ແລະສະກູຄູ່. ມີຊ່ອງຍືດລະຫວ່າງ beam ເທິງແລະ beam ຕ່ໍາ, ແລະຊ່ອງ compression ລະຫວ່າງ beam ຕ່ໍາແລະ workbench ໄດ້.
ຮ່າງກາຍຕົ້ນຕໍແມ່ນປະກອບດ້ວຍຖານ, ກະບອກນ້ໍາມັນ, ບ່ອນນັ່ງເຮັດວຽກ, ສະມາຊິກຂ້າມຕ່ໍາ (ບ່ອນນັ່ງຄາງກະໄຕລຸ່ມ), ສະມາຊິກກາບເທິງ (ບ່ອນນັ່ງຄາງກະໄຕເທິງ), ສະກູນໍາ, ຖັນແລະອົງປະກອບຕົ້ນຕໍອື່ນໆ. ທໍ່ກະບອກແລະສະກູນໍາໄດ້ຖືກຕິດຕັ້ງຢູ່ເທິງພື້ນຖານຂອງເຄື່ອງ, ແລະ piston ແມ່ນເຊື່ອມຕໍ່ໂດຍກົງກັບ workbench, ເຊິ່ງເຊື່ອມຕໍ່ແຫນ້ນກັບ beam ເທິງຜ່ານສອງຖັນ. beam ເຄື່ອນຍ້າຍສາມາດຍ້າຍຂຶ້ນແລະລົງລະຫວ່າງ workbench ແລະ beam ເທິງຕາມ screw ນໍາເພື່ອປັບ stretching ແລະ compression space. ການເຄື່ອນຍ້າຍ beam ຂຶ້ນແລະລົງແມ່ນຮັບຮູ້ໂດຍຕົວຫຼຸດຜ່ອນມໍເຕີທີ່ຕິດຕັ້ງຢູ່ເທິງຖານເພື່ອຂັບ screw ນໍາເພື່ອຫມຸນ.
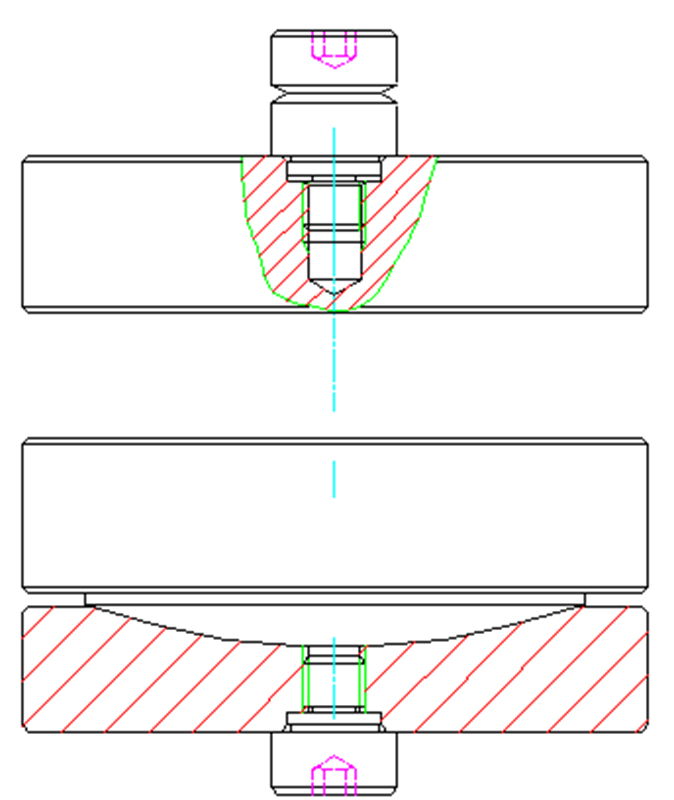
ໃນລະຫວ່າງການທົດສອບ, ຕົວຢ່າງແມ່ນໄດ້ຖືກຈັດໃສ່ໃນປາກ clamp tensile ລະຫວ່າງ beams ເທິງແລະຕ່ໍາ, ແລະນ້ໍາມັນໄຮໂດລິກໄດ້ຖືກສົ່ງຢ່າງສະດວກຈາກພາກສ່ວນລຸ່ມຂອງກະບອກສູບໄປຫ້ອງການຄວາມກົດດັນໂດຍປັມນ້ໍາມັນຄວາມກົດດັນສູງໂດຍຜ່ານ ອຸປະກອນການກັ່ນຕອງນ້ໍາມັນແລະວາວ servo ຄວາມແມ່ນຍໍາ, ເຊິ່ງເຮັດໃຫ້ piston ເພີ່ມຂຶ້ນແລະຂັບລົດ workbench, ຖັນແລະ beam ເທິງເພື່ອຍ້າຍຂຶ້ນຮ່ວມກັນ, ແລະຕົວຢ່າງແມ່ນ. ຍືດຍາວ. ອີງຕາມຄວາມຍາວທີ່ແຕກຕ່າງກັນຂອງຕົວຢ່າງ, ມັນສາມາດຖືກປັບໃຫ້ເຫມາະສົມກັບຕໍາແຫນ່ງທີ່ເຫມາະສົມໂດຍການເຄື່ອນຍ້າຍ beam ຕ່ໍາຂຶ້ນແລະລົງ. ການທົດສອບການບີບອັດແມ່ນດໍາເນີນຢູ່ໃນພື້ນທີ່ບີບອັດທີ່ປະກອບດ້ວຍຕາຕະລາງແລະ beam ເຄື່ອນຍ້າຍ. ປາຍລຸ່ມຂອງ beam ຕ່ໍາໄດ້ຖືກຕິດຕັ້ງດ້ວຍແຜ່ນຄວາມກົດດັນເທິງ, ແລະແຜ່ນຄວາມກົດດັນຕ່ໍາທີ່ມີຄູ່ spherical ແມ່ນປະກອບຢູ່ໃນ bench ການທົດສອບ. ການເຄື່ອນໄຫວດຽວກັນຂອງກະບອກນ້ໍາມັນສາມາດເຮັດສໍາເລັດການທົດສອບການບີບອັດລະຫວ່າງ workbench ແລະ beam ຕ່ໍາ. ພື້ນທີ່ດັ່ງກ່າວຍັງສາມາດຖືກນໍາໃຊ້ສໍາລັບການທົດສອບການງໍແລະການຕັດຕົວຕົວຢ່າງຫຼັງຈາກການປ່ຽນແທນຂອງເຄື່ອງບິດແລະການຕັດ.
ຫຼັງຈາກການທົດສອບແລ້ວ, ລູກສູບຈະກັບຄືນສູ່ຕຳແໜ່ງໂດຍອັດຕະໂນມັດພາຍໃຕ້ການກະທຳຂອງແຮງໂນ້ມຖ່ວງເຊັ່ນ: beam, workbench, column ແລະ piston.
(2) ທົດສອບແຫຼ່ງນ້ຳມັນ
ຕູ້ຄວບຄຸມແຫຼ່ງນ້ຳມັນແບບປະສົມປະສານ:
ຕູ້ຄວບຄຸມແຫຼ່ງນໍ້າມັນແບບປະສົມປະສານຂອງຕາຕະລາງຈຸນລະພາກຄອມພິວເຕີແມ່ນປະກອບດ້ວຍຮ່າງກາຍຕູ້, ຖັງນ້ໍາມັນ, ສະຖານີປັ໊ມງຽບຄວາມກົດດັນສູງ, ອຸປະກອນການກັ່ນຕອງນ້ໍາມັນທີ່ມີຄວາມແມ່ນຍໍາ, ກຸ່ມວາວຄວບຄຸມ electro-hydraulic servo, ລະບົບໄຟຟ້າ, ແລະອື່ນໆ. ພື້ນທີ່ເອກະລາດພາຍໃນປະສົມປະສານ. ລະບົບການຄວບຄຸມເອເລັກໂຕຼນິກ, ພື້ນທີ່ຫ່າງໄກສອກຫຼີກຈັດວາງ microcomputer host, ແລະດ້ານ counter ແຫຼ່ງນ້ໍາມັນສາມາດເພີ່ມຂຶ້ນເປັນສອງເທົ່າ microcomputer ແລະເຄື່ອງພິມ workbench. ໂຄງປະກອບການລວມແມ່ນຫນາແຫນ້ນ, ປະສົມປະສານສູງ, ມີລະບຽບຮຽບຮ້ອຍ, ຮູບຮ່າງທີ່ສວຍງາມ. ງ່າຍທີ່ຈະປະຕິບັດງານ, ຮັກສາແລະປະຕິບັດ.
ແຫຼ່ງພະລັງງານໄຮໂດຼລິກ:
ແຫຼ່ງພະລັງງານໄຮໂດຼລິກໃຫ້ພະລັງງານໄຮໂດຼລິກໃຫ້ກັບກະບອກຂັບຫຼັກ ແລະກະບອກສູບຍຶດຂອງເຄື່ອງຈັກຫຼັກ. ຮັບຮອງເອົາເທກໂນໂລຍີຜູ້ໃຫຍ່ອີງຕາມການອອກແບບແລະການຜະລິດຫນ່ວຍ modular ມາດຕະຖານ, ພິເສດສໍາລັບເຄື່ອງທົດສອບ electro-hydraulic servo universal ສະຫນັບສະຫນູນການນໍາໃຊ້. ມັນປະກອບດ້ວຍຫນ່ວຍບໍລິການໄຟຟ້າປັ໊ມນ້ໍາມັນ, ອຸປະກອນຖັງນ້ໍາມັນ, ອຸປະກອນການກັ່ນຕອງ, ກຸ່ມປ່ຽງຄວບຄຸມການໄຫຼ, ອຸປະກອນການປັບທິດທາງ, ອຸປະກອນປັບຄວາມກົດດັນ, ອຸປະກອນຄວາມປອດໄພຂອງຄວາມກົດດັນ, ແລະອື່ນໆ. ລະບົບດູດແລະຄວາມກົດດັນສູງມີອຸປະກອນການກັ່ນຕອງ, ແລະທໍ່ອອກ. ຄວາມກົດດັນຖືກຄວບຄຸມຕາມລໍາດັບໂດຍປ່ຽງ servo electro-hydraulic, ປ່ຽງບັນເທົາແມ່ເຫຼັກໄຟຟ້າແລະປ່ຽງການບັນເທົາທຸກຄູ່ມື.
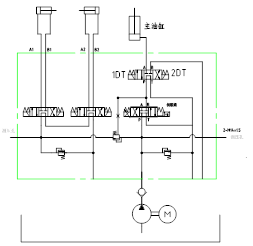
ລະບົບໄຮໂດຼລິກແມ່ນລະບົບຄວບຄຸມຄວາມໄວຂອງທໍ່ຂາເຂົ້າທີ່ປັບຕົວໄດ້. ເພື່ອຫຼຸດຜ່ອນຄວາມຮ້ອນຂອງລະບົບແລະປະຫຍັດພະລັງງານ, ທໍ່ໂຫຼດຕົ້ນຕໍຮັບຮອງເອົາວາວຄວາມກົດດັນທີ່ແຕກຕ່າງກັນແລະປ່ຽງ servo ເພື່ອສ້າງລະບົບ servo servo ເພື່ອຄວບຄຸມອັດຕາການໄຫຼ. ໃນລະຫວ່າງການທົດສອບ, ຂະຫນາດຂອງການເປີດຂອງປ່ຽງ servo electro-hydraulic ໂດຍກົງຄວບຄຸມຄວາມໄວຂອງການເຄື່ອນໄຫວ piston, ເພື່ອຮັບຮູ້ການປັບຄວາມໄວຂອງການທົດສອບ. ພາລະບົດບາດຂອງວາວຄວາມກົດດັນທີ່ແຕກຕ່າງກັນແມ່ນການປັບຄວາມກົດດັນຂອງລະບົບຢ່າງຕໍ່ເນື່ອງຕາມຄວາມຕ້ອງການຂອງຜົນບັງຄັບໃຊ້ການທົດສອບ. ວິທີການນີ້ໃຊ້ວາວຄວາມກົດດັນທີ່ແຕກຕ່າງກັນແລະວາວ servo ຄວບຄຸມລະບົບລວມກັນເອີ້ນວ່າການຄວບຄຸມການປັບຕົວການໂຫຼດ, ວິທີການຄວບຄຸມນີ້ແມ່ນວ່າເມື່ອຄວາມກົດດັນຂອງລະບົບໄຮໂດຼລິກເພີ່ມຂຶ້ນແລະຫຼຸດລົງ, ຄວາມກົດດັນຂອງລະບົບຈະປ່ຽນແປງຕາມຄວາມເຫມາະສົມ, ຮັກສາຈັງຫວະກັບການປ່ຽນແປງຂອງການທົດສອບ. ຜົນບັງຄັບໃຊ້, ບໍ່ພຽງແຕ່ຫຼຸດຜ່ອນການບໍລິໂພກພະລັງງານ, ຫຼຸດຜ່ອນຄວາມຮ້ອນ, ແຕ່ຍັງປັບປຸງຄວາມປອດໄພແລະຄວາມຫນ້າເຊື່ອຖືຂອງລະບົບໄຮໂດຼລິກທັງຫມົດ.
ແຜນວາດລະບົບໄຮໂດຼລິກ
(3) ການທົດສອບການວັດແທກ ແລະລະບົບຄວບຄຸມເຄື່ອງຈັກ
ອົງປະກອບຂອງລະບົບ:
ມັນປະກອບດ້ວຍເຊັນເຊີໄຮໂດຼລິກທີ່ມີຄວາມແມ່ນຍໍາສູງ, extensometer ເອເລັກໂຕຣນິກຄວາມແມ່ນຍໍາສູງ, ຕົວເຂົ້າລະຫັດສາຍ, ແຫຼ່ງພະລັງງານ servo, ຕົວຄວບຄຸມເອກະລາດພິເສດແລະການວັດແທກແລະຊອບແວຄວບຄຸມ, ແລະໄມໂຄຄອມພິວເຕີ Lenovo.
ຊອບແວຄວບຄຸມ:
ຕົວຄວບຄຸມ ແລະຊອບແວໄດ້ຖືກພັດທະນາໂດຍສະເພາະສຳລັບເຄື່ອງທົດສອບວັດສະດຸ. ຊອບແວແມ່ນເຂົ້າກັນໄດ້ກັບ Windows98 ກັບລະບົບປະຕິບັດການ Windows ຫຼ້າສຸດ, ແລະປະຕິບັດຕາມການຍົກລະດັບລະບົບ Windows ຢູ່ສະເຫມີ. ຈັດການຂໍ້ມູນການທົດສອບໂດຍໃຊ້ຖານຂໍ້ມູນມາດຕະຖານ, ປະສົມປະສານຫຼາຍກວ່າ 300 ມາດຕະຖານການທົດສອບລະດັບຊາດແລະອຸດສາຫະກໍາ, ແລະສະຫນັບສະຫນູນການທົດສອບ batch. ມັນສາມາດສໍາເລັດການຄວບຄຸມໃນເວລາທີ່ແທ້ຈິງ, ການຊອກຄົ້ນຫາ, ການປະມວນຜົນຂໍ້ມູນ, ການສະແດງຜົນ, ຮູບແຕ້ມເສັ້ນໂຄ້ງ, ການພິມອອກ, ການສົ່ງຕໍ່ໄລຍະໄກຂອງຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຜິດປົກກະຕິຂອງຕົວຢ່າງ, ການໂຍກຍ້າຍແລະຕົວກໍານົດການອື່ນໆ.
1) ລະບົບການວັດແທກ ແລະການຄວບຄຸມ:
ມັນປະກອບດ້ວຍແຫຼ່ງນ້ໍາມັນ electro-hydraulic servo, ເຄື່ອງຄວບຄຸມ servo PC ດິຈິຕອນເຕັມຮູບແບບ, electro-hydraulic servo valve, ເຊັນເຊີຄວາມດັນ, extensometer ສໍາລັບການວັດແທກການຜິດປົກກະຕິຂອງຕົວຢ່າງ, photoelectric encoder ສໍາລັບການວັດແທກການເຄື່ອນຍ້າຍ, ບັດຄວບຄຸມ PC ສໍາລັບເຄື່ອງທົດສອບ, ເຄື່ອງພິມ, ຊຸດທົດສອບອະເນກປະສົງ, ໜ່ວຍຄວບຄຸມໄຟຟ້າ, ແລະອື່ນໆ.
2) ແຫຼ່ງນໍ້າມັນ servo electro-hydraulic ມາດຕະຖານ:
A. ເຫມາະສໍາລັບການໂຫຼດຂອງລະບົບການຄວບຄຸມຄວາມໄວ throttle inlet ນໍ້າມັນເຊື້ອໄຟ, ການນໍາໃຊ້ເຕັກໂນໂລຊີຜູ້ໃຫຍ່ຕາມການອອກແບບແລະການຜະລິດຫນ່ວຍ modular ມາດຕະຖານ, ພິເສດສໍາລັບການນໍາໃຊ້ເຄື່ອງທົດສອບໄຟຟ້າ servo universal electro-hydraulic;
b, ການຄັດເລືອກຂອງເຄື່ອງສູບນ້ໍາເຕັກໂນໂລຢີທີ່ແກ່ຕົວ - ມໍເຕີ, ຄຸນນະພາບທີ່ເຊື່ອຖືໄດ້, ການປະຕິບັດທີ່ຫມັ້ນຄົງ;
c, ການນໍາໃຊ້ເຕັກໂນໂລຢີທີ່ເປັນເອກະລັກທີ່ພັດທະນາແລະຜະລິດໂດຍວາວຄວບຄຸມຄວາມໄວ throttle ໂຫຼດໄດ້, ຄວາມກົດດັນຂອງລະບົບມີຄວາມຫມັ້ນຄົງ, ປັບຄວາມແຕກຕ່າງກັນຄວາມກົດດັນຄົງທີ່ລະບຽບການໄຫຼ, ບໍ່ມີການບໍລິໂພກພະລັງງານ overflow, ງ່າຍທີ່ຈະ PID ການຄວບຄຸມວົງປິດ;
d, ລະບົບທໍ່: ທໍ່, ຂໍ້ຕໍ່ແລະປະທັບຕາຂອງພວກມັນຖືກເລືອກດ້ວຍການປະຕິບັດທີ່ຫມັ້ນຄົງຂອງຊຸດກຸ່ມ, ເພື່ອຮັບປະກັນວ່າລະບົບໄຮໂດຼລິກປະທັບຕາທີ່ເຊື່ອຖືໄດ້, ບໍ່ມີການຮົ່ວໄຫຼຂອງຄວາມລົ້ມເຫຼວຂອງນ້ໍາມັນ;
3) ຕູ້ຄວບຄຸມໄຟຟ້າ:
ກ. ອົງປະກອບປະຈຸບັນທີ່ເຂັ້ມແຂງທັງຫມົດຂອງລະບົບແມ່ນໄດ້ສຸມໃສ່ໃນຕູ້ຄວບຄຸມກະແສໄຟຟ້າທີ່ເຂັ້ມແຂງເພື່ອຮັບຮູ້ການແຍກປະສິດທິພາບຂອງຫນ່ວຍງານກະແສໄຟຟ້າທີ່ເຂັ້ມແຂງແລະອຸປະກອນການວັດແທກແລະຄວບຄຸມໃນປະຈຸບັນອ່ອນແອເພື່ອຮັບປະກັນວ່າລະບົບການວັດແທກແລະການຄວບຄຸມບໍ່ໄດ້ຮັບການແຊກແຊງແລະເຮັດວຽກຄົງທີ່ສໍາລັບ. ເປັນເວລາດົນນານ;
ບ. ປຸ່ມປະຕິບັດການດ້ວຍມືຖືກຕັ້ງຢູ່ເທິງຕູ້ຄວບຄຸມໄຟຟ້າ, ລວມທັງສະວິດໄຟ, ການຢຸດສຸກເສີນ ແລະປ້ຳແຫຼ່ງນໍ້າມັນເລີ່ມ ແລະຢຸດ, ແລະອື່ນໆ.
4) ລະບົບຄວບຄຸມ servo PC ດິຈິຕອນເຕັມຮູບແບບ:
ກ) ລະບົບແມ່ນອີງໃສ່ຄອມພິວເຕີ PC, ລະບຽບການ PID ດິຈິຕອລເຕັມຮູບແບບ, ແລະມີເຄື່ອງຂະຫຍາຍສຽງຂອງ PC Plate servo, ຊອບແວການວັດແທກ ແລະການຄວບຄຸມ ແລະຂໍ້ມູນການມາ ແລະຊອບແວປະມວນຜົນ, ເຊິ່ງສາມາດຮັບຮູ້ການຄວບຄຸມແບບປິດວົງຂອງຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຜິດປົກກະຕິຂອງຕົວຢ່າງ. ແລະ displacement piston ແລະສະຫຼັບກ້ຽງຂອງຮູບແບບການຄວບຄຸມ;
b) ລະບົບປະກອບດ້ວຍສາມຫນ່ວຍປັບສັນຍານ (ຫນ່ວຍບັງຄັບການທົດສອບ, ຫນ່ວຍກະບອກ piston displacement, ຫນ່ວຍຄວາມຜິດປົກກະຕິຂອງຕົວຢ່າງ), ຫນ່ວຍງານກໍາເນີດສັນຍານຄວບຄຸມ, servo valve drive ຫນ່ວຍບໍລິການ, servo ຫນ່ວຍຄວບຄຸມແຫຼ່ງນ້ໍາມັນ, ການໂຕ້ຕອບ I/O ທີ່ຈໍາເປັນ, ລະບົບຊອບແວ ແລະ ອື່ນໆ.
c) ວົງປິດການຄວບຄຸມຂອງລະບົບ: ເຊັນເຊີການວັດແທກ (ເຊັນເຊີຄວາມກົດດັນ, ເຊັນເຊີການຍ້າຍ, ຕົວຂະຫຍາຍການຜິດປົກກະຕິ), ວາວເຊີໂວ, ຕົວຄວບຄຸມ (ແຕ່ລະຫນ່ວຍປັບສັນຍານ) ແລະເຄື່ອງຂະຫຍາຍສຽງ servo ຮ່ວມກັນເປັນຈໍານວນການຄວບຄຸມວົງປິດ. loops ເພື່ອຮັບຮູ້ການທໍາງານຂອງການຄວບຄຸມວົງປິດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບຂອງເຄື່ອງທົດສອບ, ການເຄື່ອນຍ້າຍຂອງລູກສູບກະບອກສູບແລະການຜິດປົກກະຕິຂອງ. ຕົວຢ່າງ; ມັນມີຄວາມຫລາກຫລາຍຂອງໂຫມດການຄວບຄຸມ, ເຊັ່ນ: ຜົນບັງຄັບໃຊ້ການທົດສອບອັດຕາເທົ່າທຽມກັນ, ການຍ້າຍກະບອກອັດຕາເທົ່າທຽມກັນແລະຄວາມເມື່ອຍລ້າອັດຕາເທົ່າທຽມກັນ, ແລະສາມາດຮັບຮູ້ການປ່ຽນກ້ຽງຂອງຮູບແບບການຄວບຄຸມ, ດັ່ງນັ້ນລະບົບມີຄວາມຍືດຫຍຸ່ນຫຼາຍກວ່າເກົ່າ.
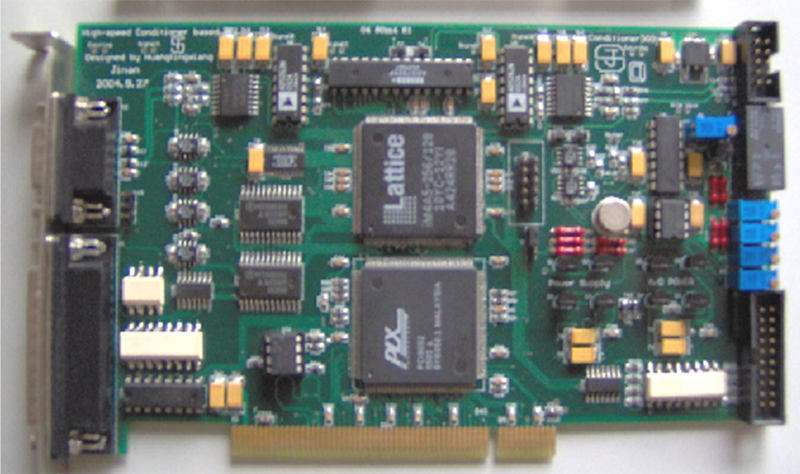
5) PC card type servo amplifier for testing machine:
a, ສໍາລັບແຜ່ນກາດ PC ທີ່ສຽບປລັກໄດ້, ການນຳໃຊ້ເຕັກໂນໂລຊີການຄວບຄຸມລົດເມຄອມພິວເຕີແບບພິເສດທີ່ອອກແບບມາສຳລັບເຄື່ອງທົດສອບ, ເຄື່ອງຂະຫຍາຍສຽງແບບອະນາລັອກທີ່ຕັ້ງໂປຣແກຣມໄດ້, ການແປງ A/D, ຊ່ອງທາງການຊື້ດິຈິຕອນ, I/O ດິຈິຕອນ, ແລະອື່ນໆ;
b, ບັດການວັດແທກພິເສດແລະການຄວບຄຸມແລະຫນ່ວຍ PC ເຂົ້າໄປໃນລະບົບການວັດແທກແລະການຄວບຄຸມບັດດຽວ, ສາມາດເຊື່ອມຕໍ່ໂດຍກົງກັບເຊັນເຊີ, ການວັດແທກແລະການຄວບຄຸມແລະການເກັບຂໍ້ມູນ, ດັ່ງນັ້ນການວັດແທກແລະການຄວບຄຸມທີ່ສັບສົນແລະລະບົບການເກັບຂໍ້ມູນກາຍເປັນ ງ່າຍດາຍແລະເຊື່ອຖືໄດ້;
c, ການນໍາໃຊ້ເຕັກໂນໂລຊີລົດເມຄອມພິວເຕີ, ໃສ່ໂດຍກົງເຂົ້າໄປໃນຊ່ອງຂະຫຍາຍຄອມພິວເຕີ, ວົງຈອນດິຈິຕອນທັງຫມົດ, ການປັບສູນ, ການປັບ, ແລະອື່ນໆແມ່ນຮັບຮູ້ໂດຍຊອບແວ, ເປັນຫນ່ວຍງານຜະລິດຕະພັນຫລ້າສຸດຂອງການທົດສອບການວັດແທກແລະການພັດທະນາເຕັກໂນໂລຊີການຄວບຄຸມ. ;
d, ຂະຫຍາຍເຄື່ອງຂະຫຍາຍສຽງແບບຕັ້ງໂປຣແກຣມໄດ້, ສາມາດຂະຫຍາຍການຂະຫຍາຍໄດ້ທີ່ແຕກຕ່າງກັນ;
e, ການສະຫນອງພະລັງງານຂົວ sensor ແລະແຮງດັນອ້າງອີງຂອງ A/D chip ແບ່ງປັນແຮງດັນດຽວກັນ, ລະບົບການວັດແທກທັງຫມົດຫຼຸດລົງຈາກປີຕໍ່ປີ, ແລະຮັບຮູ້ເຕັກໂນໂລຢີການຊົດເຊີຍຮາດແວຂອງການສະຫນອງພະລັງງານຂົວ;
f, ໂດຍຜ່ານການແປງ A/D ຫຼາຍບິດເພື່ອຕອບສະຫນອງຄວາມອ່ອນໄຫວແລະຄວາມຕ້ອງການການແກ້ໄຂຂອງລະບົບ, ເພື່ອຫຼີກເວັ້ນການວິທີການຊອບແວຄວາມຖີ່ສອງເທົ່າເພື່ອຫຼຸດຜ່ອນຄຸນລັກສະນະຂອງລະບົບ;
6) ຊຸດທົດສອບອະເນກປະສົງ:
a, ລະບົບປະຕິບັດການ Windows98 ແລະຂ້າງເທິງເວທີ, ການໂຕ້ຕອບການດໍາເນີນງານຂອງຈີນທັງຫມົດ;
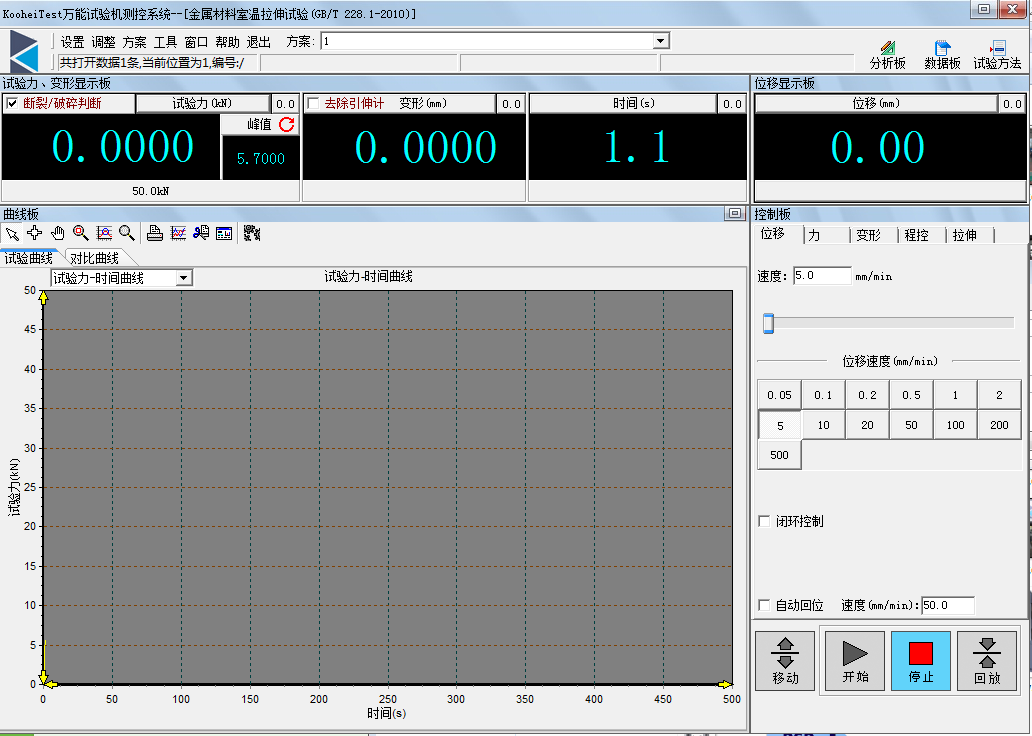
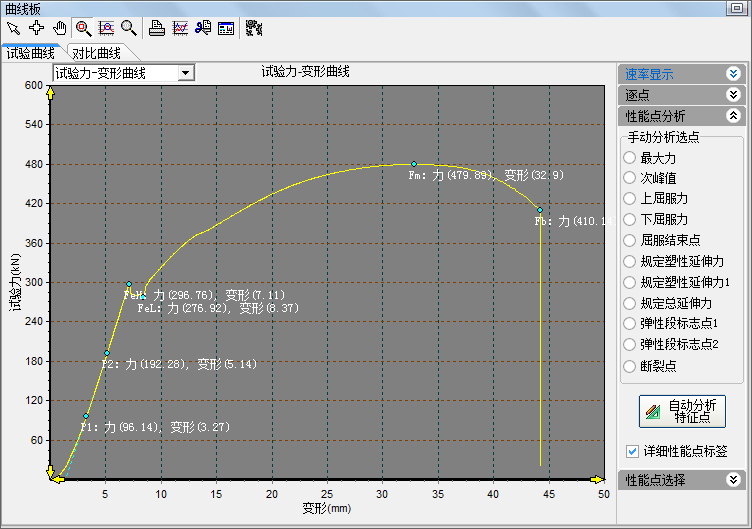
B. ໜ້າຈໍຄອມພິວເຕີສະແດງຜົນບັງຄັບໃຊ້ການທົດສອບ, ການເຄື່ອນທີ່ກະບອກສູບ, ອັດຕາການໂຫຼດ, ຂໍ້ມູນການທົດສອບການບິດເບືອນ, ແລະແຕ້ມເສັ້ນໂຄ້ງການທົດສອບທີ່ຫຼາກຫຼາຍ ເຊັ່ນ: ຜົນບັງຄັບໃຊ້ການທົດສອບເວລາ/ການບິດເບືອນ, ຜົນບັງຄັບໃຊ້ການທົດສອບການບິດເບືອນ, ແລະອື່ນໆ. ການປະມວນຜົນຂໍ້ມູນອັດຕະໂນມັດ, ຂໍ້ມູນ ວິທີການປຸງແຕ່ງຕອບສະຫນອງຄວາມຮຽກຮ້ອງຕ້ອງການຂອງມາດຕະຖານ GB228-2010, ເຊັ່ນຈຸດຜົນຜະລິດເທິງແລະຕ່ໍາ, ຈຸດຜົນບັງຄັບໃຊ້ສູງສຸດ, ທຸກປະເພດຂອງຄວາມກົດດັນທີ່ບໍ່ແມ່ນອັດຕາສ່ວນທີ່ກໍານົດໄວ້. ຈຸດ, ທຸກປະເພດຂອງຈຸດຄວາມກົດດັນ elongation ເຕັມທີ່ລະບຸໄວ້, ແລະອື່ນໆໃນເວລາດຽວກັນຕອບສະຫນອງຄວາມຮຽກຮ້ອງຕ້ອງການຂອງເຄື່ອງທົດສອບຄວາມກົດດັນ;
C. ຊອບແວຍັງສະຫນອງຟັງຊັນການວິເຄາະຂໍ້ມູນເພື່ອຕອບສະຫນອງພະນັກງານທົດສອບສໍາລັບການວິເຄາະການທົດສອບແລະການປະມວນຜົນຂໍ້ມູນການທົດສອບພິເສດ.
d, ມີຟັງຊັນການເຮັດວຽກຂອງກາຟິກທີ່ເຂັ້ມແຂງ, ເຊັ່ນ: ເສັ້ນໂຄ້ງການທົດສອບແບບໄດນາມິກ ແລະຟັງຊັນການສະແດງຜົນດິຈິຕອນ, ການຂະຫຍາຍກຣາບຟິກ, ຟັງຊັນຂັດຂວາງ, ຟັງຊັນສະແດງຜົນຂອງຕົວກະພິບ;
e, ການນໍາໃຊ້ເຕັກໂນໂລຢີການມາຂໍ້ມູນຄວາມໄວສູງ VXDs ເພື່ອບັນລຸການໄດ້ຮັບຂໍ້ມູນຄວາມໄວສູງຫຼາຍຊ່ອງ (ເຖິງ 16 ຊ່ອງ);
f, ລະບົບມີຫນ້າທີ່ປະຕິບັດການໄຟລ໌ທີ່ສົມບູນສໍາລັບເສັ້ນໂຄ້ງການທົດສອບ, ການທົດສອບການເກັບຮັກສາຂໍ້ມູນ; ໃນເວລາດຽວກັນ, ຂໍ້ມູນການທົດສອບສາມາດຖືກເກັບໄວ້ໃນຮູບແບບຂອງລະຫັດ ASCII, ເພື່ອອໍານວຍຄວາມສະດວກໃຫ້ຜູ້ໃຊ້ປະຕິບັດການປະມວນຜົນຂໍ້ມູນຂັ້ນສອງ;
7) ລະບົບຄວບຄຸມມີໜ້າທີ່ປ້ອງກັນເຊັ່ນ: ການໂຫຼດເກີນ, ການວາງເກີນ, ການປິດໄຟ, ລູກສູບເຖິງຕໍາແໜ່ງທີ່ຈຳກັດໄວ້, ແລະອື່ນໆ.
8) ການສອບຖາມ ແລະການຄົ້ນຫາແບບທົດສອບການຈັດການຂໍ້ມູນຜ່ານໄຟລ໌ຂໍ້ມູນການທົດສອບ;
ປັບແຕ່ງເນື້ອຫາ ແລະຮູບແບບຂອງບົດລາຍງານການທົດສອບຜ່ານແມ່ແບບລາຍງານ;
ໂດຍການແກ້ໄຂສູດ ແລະລາຍການຜົນໄດ້ຮັບ, ມາດຕະຖານການທົດສອບ ແລະວິທີການທົດສອບສ່ວນໃຫຍ່ສາມາດຮອງຮັບໄດ້.
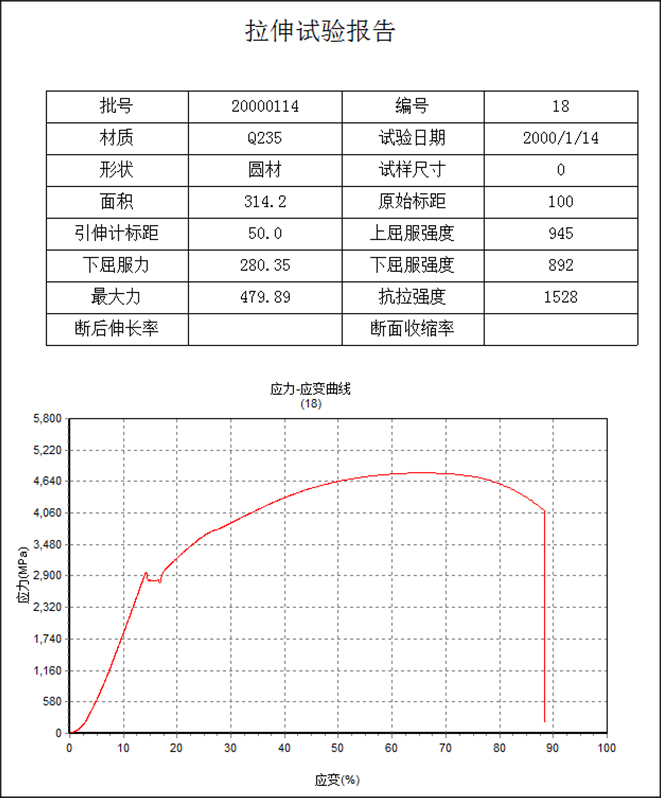
ຫຼັງຈາກໂຫຼດໄຟລ໌ຂໍ້ມູນການທົດສອບໜຶ່ງ ຫຼືຫຼາຍກວ່ານັ້ນ, ບົດລາຍງານການທົດສອບຈະຖືກສ້າງຂຶ້ນຕາມແມ່ແບບລາຍງານ ແລະສາມາດພິມອອກໄດ້.
6. ຕົວກໍານົດການດ້ານວິຊາການມາດຕະຖານຜະລິດຕະພັນ:
(1) ພາຣາມິເຕີໂຮສ:
| ພາຣາມິເຕີໂຮສ |
WA-600D |
| ຈຳນວນຖັນ |
6 ຖັນ (4 ຖັນ, 2 ສະກູ) |
| ສູງສຸດ. ໄລຍະຫ່າງລະຫວ່າງຄາງກະໄຕ (ມມ) |
650 |
| ພື້ນທີ່ບີບອັດສູງສຸດ (ມມ) |
570 |
| ໄລຍະຫ່າງລະຫວ່າງຖັນ (mm) |
460 |
| ເສັ້ນຜ່າສູນກາງດ້ານນອກສູງສຸດຂອງກະບອກສູບ (ມມ) |
Φ250 |
| ເສັ້ນຜ່າສູນກາງລູກສູບ (ມມ) |
Φ170 |
| ຈັງຫວະສູງສຸດຂອງລູກສູບ (ມມ) |
200 |
| ເສັ້ນຜ່າສູນກາງຖັນ (ມມ) |
Φ65 |
| ເສັ້ນຜ່າສູນກາງສະກູ (ມມ) |
Tr70 |
| ຂະໜາດຂອງບ່ອນເຮັດວຽກ (ມມ) |
660 x 510 |
| ຄວາມຫນາຂອງໂຕະເຮັດວຽກ (ມມ) |
80 |
| ຄວາມຫນາຂອງລໍາ (ມມ) |
300 |
(2) ຕົວກໍານົດການວັດແທກ:
| ຕົວກໍານົດການວັດແທກ |
WA-600D |
| ຜົນບັງຄັບໃຊ້ການທົດສອບສູງສຸດ (kN) |
600 |
| ລະດັບເຄື່ອງທົດສອບ |
1 |
| ຊ່ວງການວັດແທກປະສິດທິພາບຂອງແຮງທົດສອບ |
2%-100%FS |
| ຄວາມລະອຽດຂອງແຮງທົດສອບ |
1/500000 ຂອງຂະໜາດເຕັມ (ໜຶ່ງຄວາມລະອຽດຕະຫຼອດ, ບໍ່ໄດ້ໃຫ້ຄະແນນ) |
| ຄວາມຖືກຕ້ອງຂອງການວັດແທກຜົນບັງຄັບໃຊ້ການທົດສອບ |
±1% |
| ຄວາມລະອຽດການວັດແທກການເຄື່ອນຍ້າຍ |
0.01mm |
| ຄວາມຖືກຕ້ອງຂອງການວັດແທກການເຄື່ອນຍ້າຍ |
±0.5% |
| ໄລຍະການວັດແທກຄວາມຜິດປົກກະຕິ |
2%-100%FS |
| ຄວາມລະອຽດການວັດແທກຄວາມຜິດປົກກະຕິ |
0.001mm |
| ຄວາມຖືກຕ້ອງຂອງການວັດແທກການບິດເບືອນ |
±1% |
(3) ພາລາມິເຕີທີ່ແນບມາ:
| ແນບພາລາມິເຕີ |
WA-600C |
| ຮູບແບບການຍຶດ |
ການຍຶດຕິດອັດຕະໂນມັດແບບໄຮໂດຼລິກປະເພດ wedge |
| ໄລຍະຖືຕົວຢ່າງວົງ (ມມ) |
Φ13-Φ26
Φ 26 - Φ 40
|
| ໄລຍະການຖືເອົາຕົວຢ່າງແຜ່ນ (ມມ) |
0-15,15-30 |
| ຄວາມກວ້າງຂອງຕົວຍຶດ (ມມ) |
80 |
| ຂະໜາດແຜ່ນຄວາມດັນເທິງ ແລະລຸ່ມ (ມມ) |
Φ160 |
| ເສັ້ນຜ່າສູນກາງຂອງລູກກິ້ງບິດ (ທາງເລືອກ) |
Φ30 |
| ເສັ້ນຜ່າສູນກາງມ້ວນໂຄ້ງ (ມມ) |
Φ30 |
| ຄວາມກວ້າງສູງສຸດຂອງມ້ວນຮອງຮັບໂຄ້ງ (ມມ) |
140 |
| ໄລຍະຫ່າງສູງສຸດລະຫວ່າງລູກກິ້ງໂຄ້ງ (ມມ) |
320 |
| ການງໍທີ່ອະນຸຍາດສູງສຸດ (ມມ) |
100 |
(4) ຕົວກໍານົດການເຄື່ອງຈັກ:
| ໂຄງການ |
WAW-600C |
| ຂະໜາດເຄື່ອງຈັກຫຼັກ (ບໍ່ລວມຈັງຫວະຍົກລູກສູບ)(ມມ) |
720×610×2140 |
| ຂະໜາດແຫຼ່ງນ້ຳມັນ (ມມ) |
1150×650×870 |
| ນ້ຳໜັກ (Kg) |
ເຄື່ອງຫຼັກ |
ປະມານ 1500 |
| ແຫຼ່ງນໍ້າມັນ |
ປະມານ 300 |
| ມໍເຕີປ້ຳນ້ຳມັນຫຼັກ (KW) |
1.5 |
| ພະລັງງານມໍເຕີເຄື່ອນທີ່ Beam (KW) |
0.4 |
| ພະລັງງານທັງໝົດ (kW) |
1.5+0.4 |
| ການສະຫນອງພະລັງງານ |
ລະບົບຫ້າສາຍສາມເຟດ, 380V, 50HZ |
| ສະພາບແວດລ້ອມການນຳໃຊ້ |
ບໍ່ສັ່ນສະເທືອນ, ບໍ່ມີຂີ້ຝຸ່ນ, ອຸນຫະພູມຫ້ອງ (10-35℃); ຄວາມຊຸ່ມຊື່ນ ≤80% |
7. ອົງປະກອບ ແລະການຕັ້ງຄ່າຜະລິດຕະພັນ:
(1) ສ່ວນໂຮສມາດຕະຖານ
ເຈົ້າພາບເຄື່ອງທົດສອບລະບົບໄຮໂດຼລິກທົ່ວໄປ: 1
ເຄື່ອງທົດສອບລະບົບໄຮໂດຼລິກສາກົນແຫຼ່ງນ້ຳມັນມາດຕະຖານ: :1 ຊຸດ
Electro-hydraulic servo controller full digital PC controller: 1
ເຄື່ອງທົດສອບບັດຄວບຄຸມ PC ພິເສດ: 1 ຊິ້ນ
ຄອມພິວເຕີທຸລະກິດຕັ້ງໂຕະ: 1 (ເຄື່ອງບິນທຸລະກິດຍີ່ຫໍ້ Lenovo)
ເຄື່ອງພິມ: 1 (ເຄື່ອງພິມ inkjet A4)
ວາວເຊີໂວອີເລັກໂທຣ-ໄຮໂດລິກ: 1
ກ່ອງຄວບຄຸມໄຟຟ້າ (ປະສົມປະສານກັບແຫຼ່ງນໍ້າມັນ): 1 ຊຸດ
ເຊັນເຊີການຍ້າຍ: 1 (ແສງ Changchun - Kaien)
ເຊັນເຊີໄຮໂດລິກ: 1 ຊິ້ນ (Taiqin, 30MPa)
ເຄື່ອງວັດແທກໄລຍະຂະຫຍາຍ: 1 ຊິ້ນ (ສະຖາບັນຄົ້ນຄວ້າເຫຼັກແລະເຫຼັກກ້າປັກກິ່ງ)
(2) ອຸປະກອນທົດສອບການຕັ້ງຄ່າມາດຕະຖານ (ລາຍການທີ່ສະແດງຢູ່ໃນແຜນວາດຈະຊະນະ)
ອຸປະກອນຍຶດໄຮໂດຼລິກ: 2 ຊຸດ (ລຳຕົວເທິງ ແລະ ລຸ່ມສ້າງໃນ 1 ຊຸດ);
ແຜ່ນບັດ Clamp: 1 ຄູ່ (ທັງໝົດ 4 ຊິ້ນ);
ຄາງກະໄຕຮອບຮູບ V: 2 ຄູ່ (φ13~ 26mm, φ26~ 40mm, ຈໍານວນທັງຫມົດ 8 ຊິ້ນ);

Plate jaw: 1 ຄູ່, (0~15mm,15-30, ຈໍານວນທັງຫມົດ 8 ຊິ້ນ);

ອຸປະກອນເສີມການບີບອັດ: 1 ຊຸດ (φ160), ແຜ່ນຄວາມກົດດັນຕ່ໍາທີ່ມີຄູ່ spherical ທີ່ສາມາດປັບໄດ້;
ອຸປະກອນເສີມ Bending (ທາງເລືອກ) : 1 ຊຸດ (ສາມຈຸດ, ລວມທັງຕົວຮອງ, ມ້ວນສະຫນັບສະຫນູນ, ເຊືອກເຊື່ອມຕໍ່ຄວາມກົດດັນ, ມ້ວນກົດ);
(3) ອາໄຫຼ່
ປ່ຽງ: O-ring 10 ຊິ້ນ;
ປ່ຽງ: ປ່ຽງລວມ 10 ຊິ້ນ;
ເບາະຂີ້ຝຸ່ນ: 2 ຊິ້ນ (ເພື່ອປ້ອງກັນການຕົກຄ້າງຂອງຕົວຢ່າງຈາກຮູຂຸມຂົນຂອງແຜ່ນເລື່ອນ);
(4) ຂໍ້ມູນແບບສຸ່ມ
ລາຍການບັນຈຸ: 1 ສະບັບ;
ໃບຮັບປະກັນ: 1 ສະບັບ;
ໃບຢັ້ງຢືນການຢັ້ງຢືນໂຮງງານ: 1 ສະບັບ;
ຄູ່ມືເຄື່ອງທົດສອບ: 1 ສະບັບ;
ຄູ່ມືຊອບແວ: 1 ສຳເນົາ;
ຊອບແວສຳຮອງ CD: 1;
ຄອມພິວເຕີ ແລະເຄື່ອງພິມຂໍ້ມູນສຸ່ມຕົ້ນສະບັບ: 1 ຊຸດ;
ເຊັນເຊີ, extensometer, ມໍເຕີ, ປ້ຳນ້ຳມັນ, ຕົວຫຼຸດ ແລະຂໍ້ມູນສຸ່ມຕົ້ນສະບັບອື່ນໆ.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese






























