1. ການແນະນຳຜະລິດຕະພັນ
SDW-E100 microcomputer ຄວບຄຸມ double-channel compression and torsion testing machine is a new generation microcomputer controlled measurement and control system designed specially for universities and scientific research institute. ລະບົບຄອມພິວເຕີຄວບຄຸມການຫມຸນຂອງມໍເຕີ servo ຜ່ານຕົວຄວບຄຸມດິຈິຕອນຢ່າງເຕັມທີ່ແລະລະບົບຄວບຄຸມຄວາມໄວສອງທາງ. ຫຼັງຈາກລະບົບ deceleration, screw ບານຄວາມແມ່ນຍໍາເຮັດໃຫ້ beam ເຄື່ອນທີ່ເພີ່ມຂຶ້ນແລະຫຼຸດລົງ, ແລະການບິດຂອງຫົວໂຫຼດໄດ້ສໍາເລັດຄວາມຕ້ອງການປະສົມປະສານການທົດສອບເຊັ່ນ: tensile, torsion, torsion compression ແລະອື່ນໆ. ນອກຈາກນັ້ນ, ຫຼາກຫຼາຍຂອງອຸປະກອນການທົດສອບແມ່ນໄດ້ຮັບການຕັ້ງຄ່າ. ມັນມີຄວາມສົດໃສດ້ານຄໍາຮ້ອງສະຫມັກຢ່າງກວ້າງຂວາງໃນການທົດສອບຄຸນສົມບັດກົນຈັກຂອງໂລຫະ, ບໍ່ແມ່ນໂລຫະ, ວັດສະດຸປະສົມແລະຜະລິດຕະພັນ.
ຢູ່ໃນຫຼັກຂອງລະບົບ, ສອງເຊັນເຊີແລະລະບົບການໂຫຼດແມ່ນຢູ່ຄູ່ກັນແລະບໍ່ມີຜົນຕໍ່ກັນແລະກັນໃນລະຫວ່າງການທົດສອບ.
2. ຕົວຊີ້ວັດດ້ານວິຊາການຫຼັກ
1. ແຮງທົດສອບສູງສຸດ: 20kN
3. ໄລຍະການວັດແທກຜົນບັງຄັບໃຊ້: 0.2%--100%.
4. ການທົດສອບຄວາມຖືກຕ້ອງຂອງຕົວຊີ້ວັດຜົນບັງຄັບໃຊ້: ດີກວ່າຄ່າຕົວຊີ້ວັດ ±0.5%
5. ຄວາມລະອຽດຂອງແຮງທົດສອບ :1/500000(ບໍ່ໄດ້ຄະແນນເຕັມ ຫຼື ທຽບເທົ່າ 6)
5. ຄວາມຖືກຕ້ອງຂອງການວັດແທກການກະຈາຍ Beam: ຄວາມລະອຽດສູງກ່ວາ 0.001mm
6. ຄວາມຖືກຕ້ອງຂອງການວັດແທກມຸມ: 0.02 ອົງສາ
7. ໄລຍະຄວາມໄວການທົດສອບ: 0.001-500mm / ນາທີ, ລະບຽບຄວາມໄວ stepless
8. ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມຄວາມໄວ : ±1%(0.01~10mm/min);
9. ຜົນບັງຄັບໃຊ້ຄົງທີ່, ການບິດເບືອນຄົງທີ່, ໄລຍະການຄວບຄຸມການເຄື່ອນທີ່ຄົງທີ່: 0.2%-100%FS
10. ຜົນບັງຄັບໃຊ້ຄົງທີ່, ການບິດເບືອນຄົງທີ່, ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມການເຄື່ອນຍ້າຍຄົງທີ່:
ເມື່ອຄ່າທີ່ຕັ້ງໄວ້ແມ່ນ <10%FS, ຄ່າທີ່ກໍານົດໄວ້ຢູ່ພາຍໃນ ±1.0%
ເມື່ອຄ່າທີ່ກໍານົດໄວ້ແມ່ນ ≥10%FS, ຄ່າທີ່ກໍານົດໄວ້ແມ່ນພາຍໃນ ±0.1%
11. ແຮງບິດສູງສຸດ: 500N·m;
12. Relative error of test torque value: level 1 (±1%)
13. Test torque repeatability relative indication error: ≤1%
14. ຄວາມລະອຽດຂອງແຮງບິດ: 0.01N.m
15. ໄລຍະການວັດແທກ Torsion Angle: ບໍ່ຈຳກັດ
16. ຄ່າທີ່ອ່ານຕໍ່າສຸດ: 0.1°
17. Relative error of torsion Angle measurement: ±1.0%
18. ຄວາມໄວບິດ: 0.1 ~ 360°/ນາທີ ການຕັ້ງຄ່າຕາມໃຈມັກ
19 ຄວາມຜິດພາດທີ່ສົມທຽບຂອງຄວາມໄວ torsional: ພາຍໃນ ±1.0% ຂອງຄ່າທີ່ຕັ້ງໄວ້
20 ທິດທາງບິດ: ການປີ້ນໄປໜ້າ
21. ພື້ນທີ່ທົດສອບ (ປັບແຕ່ງໄດ້): A. ພື້ນທີ່ຍືດ :900mm B. ພື້ນທີ່ບີບອັດ :1000mm C. Width :500mm
22. Fixture form: ອີງຕາມຕົວຢ່າງ
23. ການສະຫນອງພະລັງງານ: ໄລຍະດຽວ, 220V±10%,50Hz, ພະລັງງານ: 3kW
24. ສະພາບແວດລ້ອມໃນການເຮັດວຽກ: ອຸນຫະພູມຫ້ອງ -35 ℃, ຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງບໍ່ເກີນ 80%
25. ຂະໜາດເຈົ້າພາບ :960mm×550mm×2050mm
26. ນ້ຳໜັກຄຳ :580 kg
3. ລາຍລະອຽດການແກ້ໄຂ
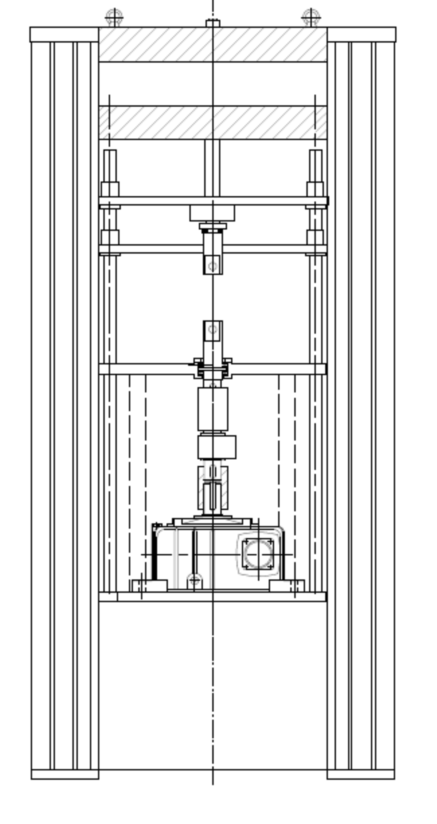
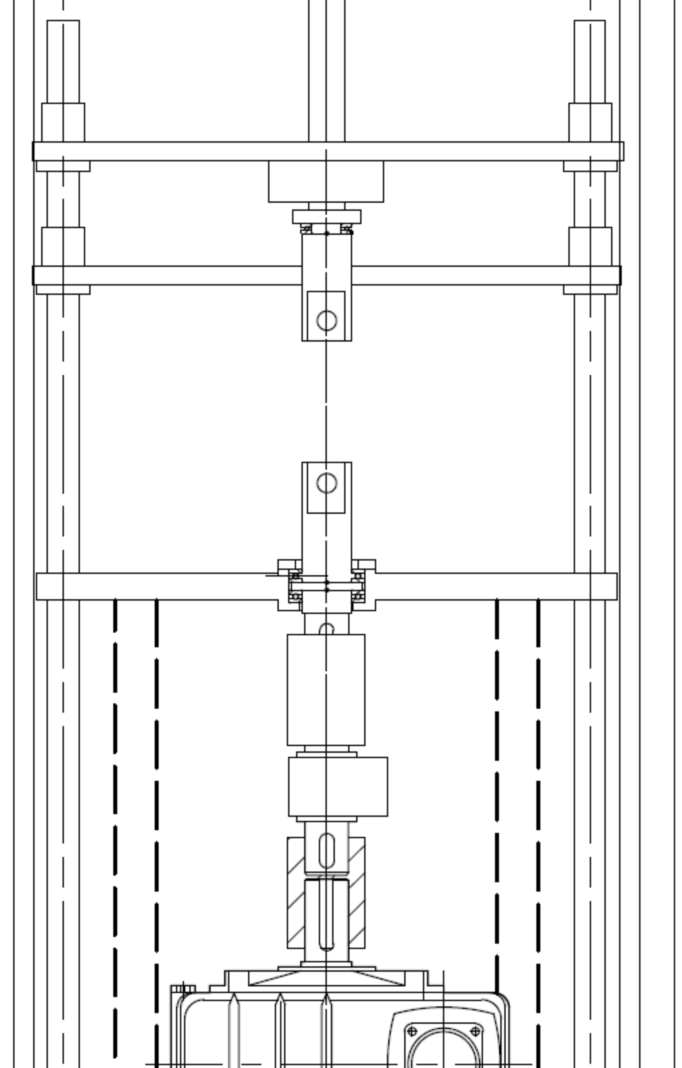
1) ເຄື່ອງໂຮດ
1.1 ເຄື່ອງຕົ້ນຕໍຮັບຮອງເອົາໂຄງສ້າງກອບເຫຼັກສູງ, ມີຄວາມເຂັ້ມແຂງສູງແລະການຜິດປົກກະຕິຂະຫນາດນ້ອຍ;
1.2 ການນໍາເຂົ້າສະກູບານທີ່ມີຄວາມແມ່ນຍໍາສູງ, ການສົ່ງໄຟຟ້າທີ່ມີປະສິດທິພາບ ແລະສະຖຽນລະພາບ;
1.3 ພາກສ່ວນສົ່ງແມ່ນຂັບເຄື່ອນດ້ວຍສາຍແອວ synchronous arc ແຂ້ວເປັນວົງ, ແລະບໍ່ມີຊ່ອງຫວ່າງສອງທາງໃນຂະບວນການສາຍສົ່ງ;
1.4 AC servo motor ແລະລະບົບຂັບໄດ້ຖືກຮັບຮອງເອົາເພື່ອຮັບປະກັນການສົ່ງກ້ຽງ, ແຮງບິດທີ່ຫມັ້ນຄົງ, ມີ overcurrent, overvoltage, ອຸປະກອນປ້ອງກັນ overload, ອັດຕາສ່ວນຄວາມໄວເຖິງ 1: 100,000;
1.5 Fixture ໂດຍການອອກແບບພິເສດ, ຍຶດແຫນ້ນແຫນ້ນ, ງ່າຍຕໍ່ການປະຕິບັດ, ບໍ່ມີປະກົດການເລື່ອນ clamp;
1.6 ຂະບວນການພິເສດຮັບປະກັນການຮ່ວມຂອງເຄື່ອງທົດສອບ ແລະລົບລ້າງອິດທິພົນຂອງຕົວຢ່າງທີ່ບໍ່ສະຫມໍ່າສະເຫມີໃນເຊັນເຊີ.
1.7NMRV ຕົວຫຼຸດຄວາມແມ່ນຍໍາສູງ, ລົບຫຼັງສູນເພື່ອຮັບປະກັນວ່າບໍ່ມີ backlash
1.8 ກອບປະຕິກິລິຢາຕ້ານການ coupling ເພື່ອຮັບປະກັນວ່າເຊັນເຊີທັງສອງບໍ່ມີຜົນກະທົບເຊິ່ງກັນແລະກັນໃນລະຫວ່າງການບີບອັດແລະການບິດ.
2) ລະບົບຄວບຄຸມ
ລະບົບການວັດແທກວົງປິດແບບດິຈິຕອລເຕັມຊ່ອງຄູ່ສອງຊ່ອງມີຄຸນສົມບັດຂັ້ນສູງ ແລະນະວັດຕະກໍາທາງເທັກນິກຫຼາຍອັນ, ສ່ວນໃຫຍ່ແມ່ນສະທ້ອນໃຫ້ເຫັນໃນ:
2.1 ການຄວບຄຸມສີ່ວົງປິດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຜິດປົກກະຕິຂອງຕົວຢ່າງ, ການຍ້າຍ beam ແລະຂະບວນການທົດສອບໄດ້ຖືກຮັບຮູ້; ການປະຕິບັດການໂຫຼດເອກະລາດສອງຄັ້ງ, ການບິດຄັ້ງທໍາອິດແລະຫຼັງຈາກນັ້ນກົດ, ການກົດຄັ້ງທໍາອິດແລະຫຼັງຈາກນັ້ນບິດສາມາດຕັ້ງຄ່າໄດ້ຢ່າງເສລີ, ຂະບວນການຄວບຄຸມສາມາດປ່ຽນແປງໄດ້ຢ່າງເສລີ.
2.2 ລະບົບການໄດ້ມາຂໍ້ມູນປະກອບດ້ວຍສີ່ຊ່ອງການແປງ A/D ຄວາມແມ່ນຍໍາສູງ 24-ບິດ. ຄວາມລະອຽດສູງສຸດແມ່ນ 1/300000, ຂະບວນການທັງຫມົດບໍ່ໄດ້ຖືກແບ່ງອອກ;
2.3 ເລືອກ BB, AD, Xilinx ແລະອຸປະກອນປະສົມປະສານຍີ່ຫໍ້ຕົ້ນສະບັບອື່ນໆ, ການອອກແບບດິຈິຕອນທັງຫມົດ;
2.4 ສອດຄ່ອງກັບມາດຕະຖານ PCI bus, microcomputer ອັດຕະໂນມັດການກໍານົດແລະການຕິດຕັ້ງ, ເພື່ອບັນລຸ "plug and test";
2.5 ລະບົບການວັດແທກທາງອີເລັກໂທຣນິກບໍ່ມີອົງປະກອບອະນາລັອກເຊັ່ນ potentiometers ເພື່ອຮັບປະກັນການປ່ຽນແທນກັນ ແລະອຳນວຍຄວາມສະດວກໃນການຮັກສາ ແລະປ່ຽນແທນ.
2.6 ເຄື່ອງມືທົດແທນຊອບແວແບບຂະໜານສາມາດໃຊ້ເປັນເຄື່ອງດຽວແບບທຳມະດາໄດ້.
3. ລາຍລະອຽດລັກສະນະການເຮັດວຽກຫຼັກຂອງຊອບແວ
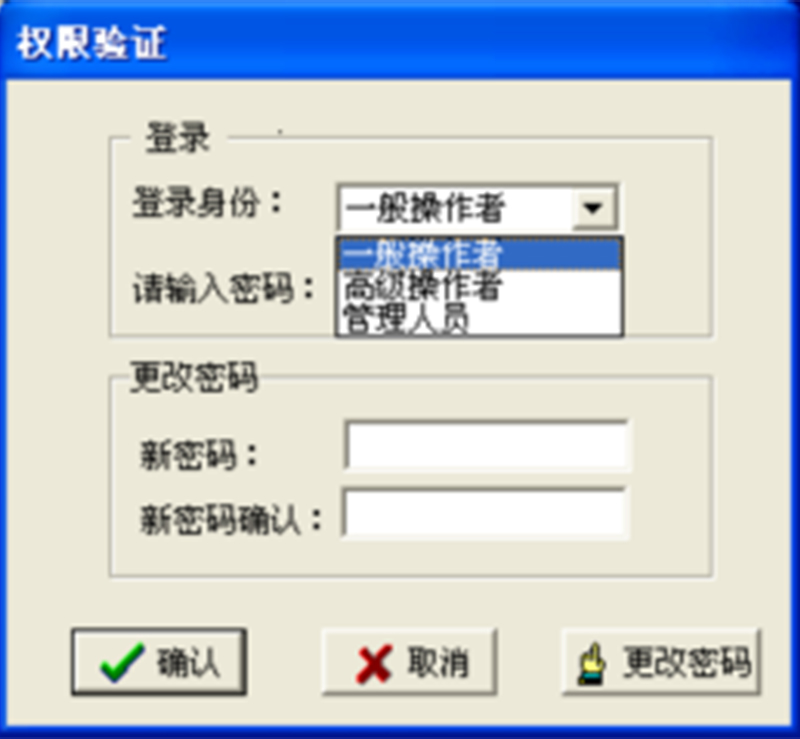
(1) ໂດຍການຄຸ້ມຄອງສິດທິ, ລະດັບຂອງຕົວປະຕິບັດການທີ່ແຕກຕ່າງກັນມີສິດການດໍາເນີນງານທີ່ແຕກຕ່າງກັນ, ເມນູທີ່ເຮັດວຽກໄດ້ແລະເນື້ອຫາອື່ນໆກໍ່ແຕກຕ່າງກັນ, ເຊິ່ງບໍ່ພຽງແຕ່ເຮັດໃຫ້ຜູ້ປະກອບການທໍາມະດາງ່າຍດາຍ, ສະດວກແລະໄວ, ແຕ່ຍັງປົກປ້ອງລະບົບຢ່າງມີປະສິດທິພາບ. ;
(2) ການວັດແທກເວລາຈິງ ແລະການສະແດງຜົນແຮງທົດສອບ ແລະຈຸດສູງສຸດ, ການເຄື່ອນຍ້າຍ, ການປ່ຽນຮູບ ແລະສັນຍານອື່ນໆ; ມັນຮັບຮູ້ການໄດ້ມາແລະການຄວບຄຸມໃນເວລາທີ່ແທ້ຈິງພາຍໃຕ້ Win7, Win10 ແລະເວທີ win ອື່ນໆ. ໄລຍະເວລາທີ່ຖືກຕ້ອງແລະການເກັບຕົວຢ່າງຄວາມໄວສູງແມ່ນຮັບຮູ້.
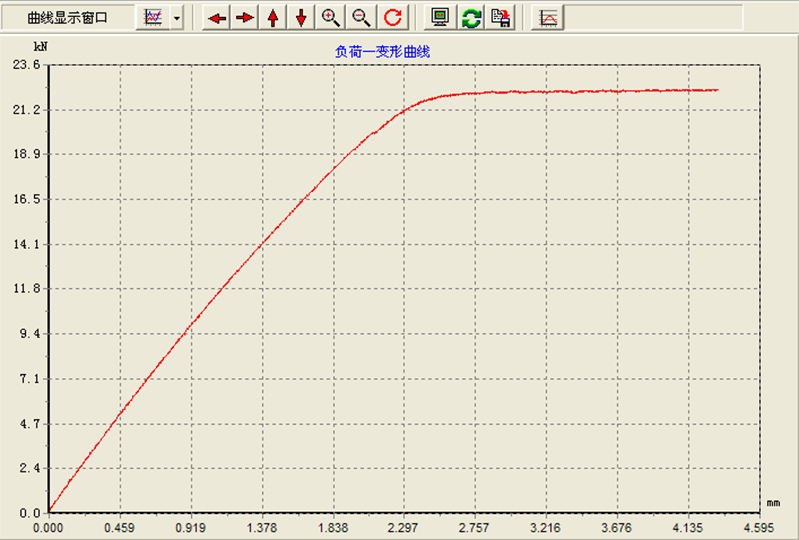
(3) ຮັບຮູ້ການສະແດງໜ້າຈໍແບບສົດໆຂອງເວລາໂຫຼດ, ການເຄື່ອນຍ້າຍການໂຫຼດ, ເວລາບິດມຸມ ແລະເສັ້ນໂຄ້ງການທົດສອບອື່ນໆ, ເຊິ່ງສາມາດສະຫຼັບ ແລະສັງເກດໄດ້ທຸກເວລາ, ແລະການຂະຫຍາຍ ແລະ ການຫຼຸດຜ່ອນເສັ້ນໂຄ້ງແມ່ນສະດວກຫຼາຍ;
(4) ດ້ວຍຕົວກໍານົດການທົດສອບຂອງການເກັບຮັກສາຄອມພິວເຕີ, ການຕັ້ງຄ່າ, ການໂຫຼດແລະຟັງຊັນອື່ນໆ, ສູນ, calibration ແລະການດໍາເນີນງານອື່ນໆແມ່ນດໍາເນີນການຈາກຊອບແວ, ແຕ່ລະພາລາມິເຕີສາມາດໄດ້ຮັບການເກັບຮັກສາແລະໂທຫາຢ່າງສະດວກສະບາຍ, ດັ່ງນັ້ນ. ເຈົ້າພາບທີ່ມີເຊັນເຊີຫຼາຍສາມາດປ່ຽນໄດ້ງ່າຍ, ແລະບໍ່ມີຂອບເຂດຈໍາກັດ;
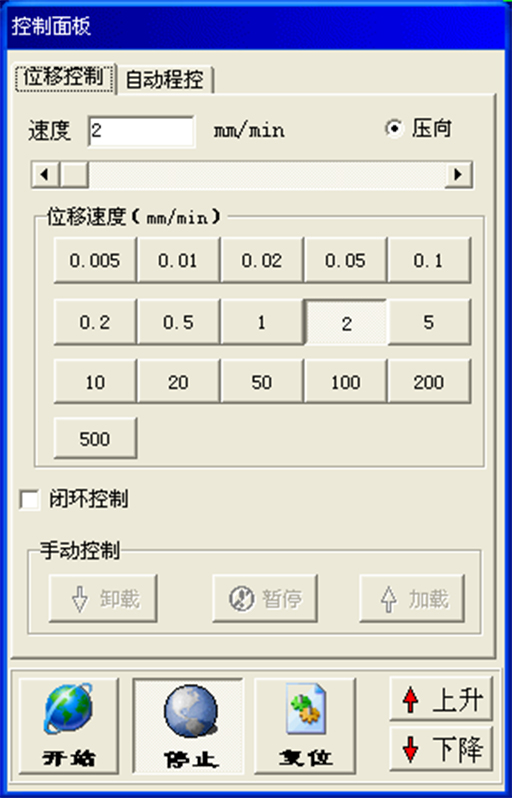
(5) ຮອງຮັບວິທີການຄວບຄຸມທີ່ຫຼາກຫຼາຍ, ລວມທັງການເຄື່ອນທີ່ຄວາມໄວຄົງທີ່ຂອງ loop ເປີດ ແລະຜົນບັງຄັບໃຊ້ຄວາມໄວຄົງທີ່, ຄວາມໄວຄົງທີ່ຄວາມກົດດັນຄົງທີ່ຄວາມໄວມຸມ, ຄວາມບິດຄວາມໄວຄົງທີ່ ແລະວິທີການຄວບຄຸມວົງປິດອື່ນໆ; ເສັ້ນໂຄ້ງອ້າງອິງມາດຕະຖານແມ່ນໄດ້ຮັບໃນຂະບວນການປັບຕົວກໍານົດການວົງປິດ, ດັ່ງນັ້ນຜູ້ໃຊ້ສາມາດສັງເກດເຫັນອິດທິພົນຂອງແຕ່ລະຕົວກໍານົດການກ່ຽວກັບຜົນກະທົບຂອງວົງປິດ.
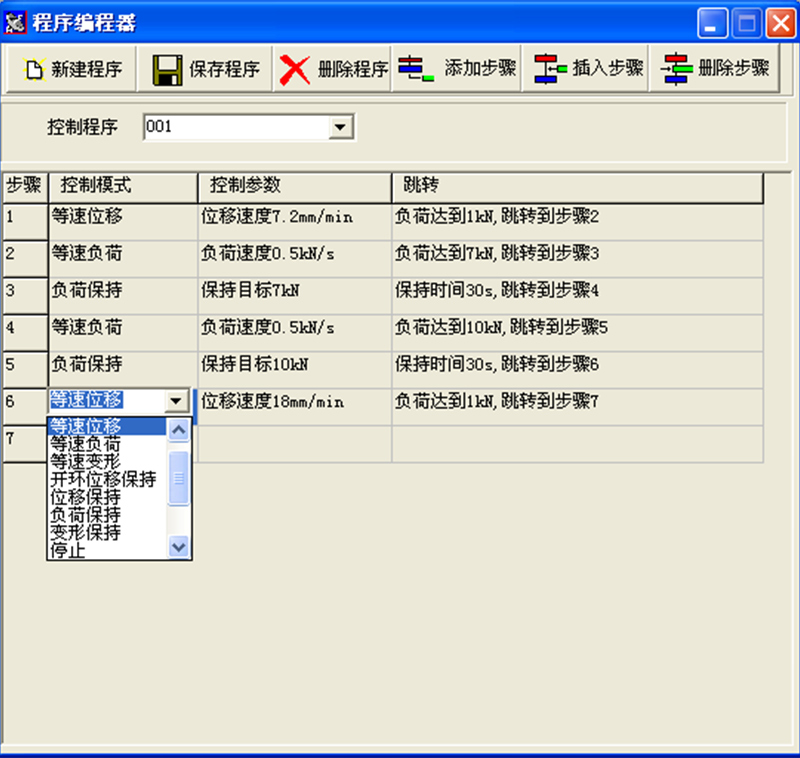
(6) ດ້ວຍຂະບວນການທົດສອບລະບົບຄວບຄຸມການຕັ້ງຄ່າອັດສະລິຍະລະບົບຜູ້ຊ່ຽວຊານ, ເພື່ອໃຫ້ຜູ້ໃຊ້ມືອາຊີບມີໂປຣແກຣມຄວບຄຸມໂປຣແກຣມອັດຕະໂນມັດ. ຜູ້ໃຊ້ສາມາດປະສົມປະສານຄວາມຫລາກຫລາຍຂອງວິທີການຄວບຄຸມແລະຄວາມໄວການຄວບຄຸມຕາມຄວາມຕ້ອງການຕົວຈິງ, ແລະກະກຽມໂຄງການຄວບຄຸມທີ່ເຫມາະສົມກັບຄວາມຕ້ອງການຂອງພວກເຂົາ. ຊອບແວການວັດແທກແລະການຄວບຄຸມຈະຄວບຄຸມຂະບວນການທົດສອບໂດຍອັດຕະໂນມັດຕາມການຕັ້ງຄ່າຂອງຜູ້ໃຊ້.
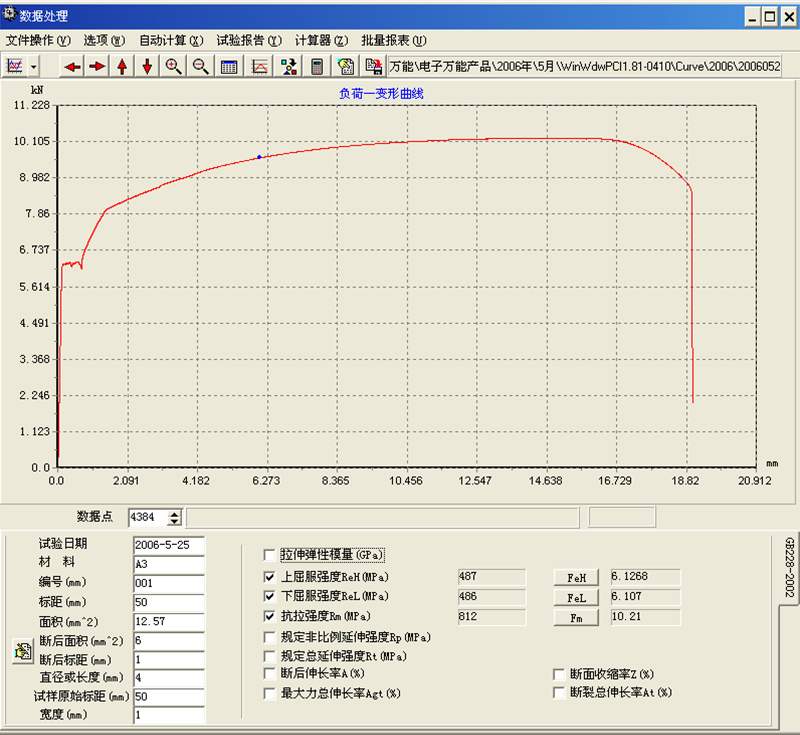
(7) ການນໍາໃຊ້ການໂຕ້ຕອບມະນຸດກັບຄອມພິວເຕີເພື່ອວິເຄາະຂໍ້ມູນ. ວິທີການປຸງແຕ່ງສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງມາດຕະຖານການນໍາໃຊ້ຢ່າງກວ້າງຂວາງ, ສາມາດຄິດໄລ່ອັດຕະໂນມັດ modulus elastic, ຄວາມເຂັ້ມແຂງຂອງຜົນຜະລິດ, ຄວາມເຂັ້ມແຂງການຂະຫຍາຍທີ່ບໍ່ແມ່ນອັດຕາສ່ວນແລະຕົວກໍານົດການປະຕິບັດອື່ນໆ, ແລະຍັງສາມາດແຊກແຊງຂະບວນການວິເຄາະດ້ວຍຕົນເອງເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງການວິເຄາະ. ການປະມວນຜົນຂໍ້ມູນອື່ນໆຍັງສາມາດປະຕິບັດໄດ້ຕາມມາດຕະຖານທີ່ໃຫ້ໂດຍຜູ້ໃຊ້. ລູກຄ້າຕ້ອງການໃຫ້ຂໍ້ກໍານົດການຜະລິດຂໍ້ມູນສະເພາະ
(8) ຂໍ້ມູນການທົດສອບຖືກເກັບໄວ້ໃນໄຟລ໌ຂໍ້ຄວາມເພື່ອຄວາມສະດວກໃນການສອບຖາມຜູ້ໃຊ້, ແລະຂໍ້ມູນການທົດສອບໄດ້ຖືກປະມວນຜົນຄືນໃຫມ່ໂດຍໃຊ້ບົດລາຍງານທຸລະກິດທົ່ວໄປ, ຊອບແວການປະມວນຜົນຄໍາ, ແລະການສົ່ງຂໍ້ມູນເຄືອຂ່າຍແມ່ນສະດວກ;
(9) ມັນສາມາດບັນທຶກແລະບັນທຶກເສັ້ນໂຄ້ງຂໍ້ມູນຂອງຂະບວນການທັງຫມົດຂອງການທົດສອບ, ແລະມີຫນ້າທີ່ສາທິດເພື່ອບັນລຸການແຜ່ພັນຂອງເສັ້ນໂຄ້ງການທົດສອບ. ເສັ້ນໂຄ້ງຍັງສາມາດ superimposed ແລະປຽບທຽບເພື່ອສ້າງຄວາມສະດວກໃນການວິເຄາະປຽບທຽບ;
(10) ບົດລາຍງານການທົດສອບສາມາດພິມໄດ້ໃນຮູບແບບທີ່ຜູ້ໃຊ້ຕ້ອງການ. ຜູ້ໃຊ້ສາມາດເລືອກເນື້ອໃນຂອງບົດລາຍງານຜົນຜະລິດຂໍ້ມູນພື້ນຖານ, ຜົນການທົດສອບແລະເສັ້ນໂຄ້ງການທົດສອບເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຕ່າງໆ;
(11) ການປັບສູນດິຈິຕອນແລະການປັບຕົວອັດຕະໂນມັດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບແລະການຜິດປົກກະຕິແມ່ນຮັບຮູ້, ເຊິ່ງສະດວກສໍາລັບການດໍາເນີນງານແລະປັບປຸງຄວາມຫນ້າເຊື່ອຖືຂອງເຄື່ອງຈັກ. ລະບົບພາລາມິເຕີຕ່າງໆການຕັ້ງຄ່າຖືກເກັບໄວ້ໃນຮູບແບບໄຟລ໌, ງ່າຍຕໍ່ການບັນທຶກແລະຟື້ນຟູ;
(12) ສາມາດໃຊ້ໃນ Win7, Win8, Win10 ແລະລະບົບປະຕິບັດການອື່ນໆ. ການຄວບຄຸມຂະບວນການທົດສອບ, ການປ່ຽນແປງຄວາມໄວການເຄື່ອນຍ້າຍ beam, ການປ້ອນຂໍ້ມູນພາລາມິເຕີແລະການດໍາເນີນງານອື່ນໆສາມາດສໍາເລັດດ້ວຍແປ້ນພິມ, ຫນູ, ງ່າຍຕໍ່ການນໍາໃຊ້;
(13) ສາມາດກໍານົດອັດຕະໂນມັດແລະສະຫນັບສະຫນູນການຄວບຄຸມຈຸດພາຍນອກ, ເພື່ອໃຫ້ສະດວກໃນການຕິດຕັ້ງຕົວຢ່າງ;
(14) ດ້ວຍການປົກປ້ອງ overload ຟັງຊັນຢຸດອັດຕະໂນມັດ, ແລະສາມາດຕັດສິນການກະດູກຫັກຂອງຕົວຢ່າງ, ການຢຸດອັດຕະໂນມັດ.
ອີງຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້ທີ່ແຕກຕ່າງກັນ, ຟັງຊັນຊອບແວຂ້າງເທິງຈະຖືກເພີ່ມ ຫຼືຫຼຸດລົງ ຫຼືປັບປ່ຽນ.
4. ສ່ວນຕິດຕໍ່ການເຮັດວຽກຂອງຊອບແວ ແລະຊອບແວ
(1) ຊອບແວສາມາດນໍາສະເຫນີລະບົບປ່ອງຢ້ຽມຈີນທີ່ສອດຄ່ອງກັບແບບ Windows ໃນສ່ວນຕິດຕໍ່ຜູ້ໃຊ້ Windows7/8/10.
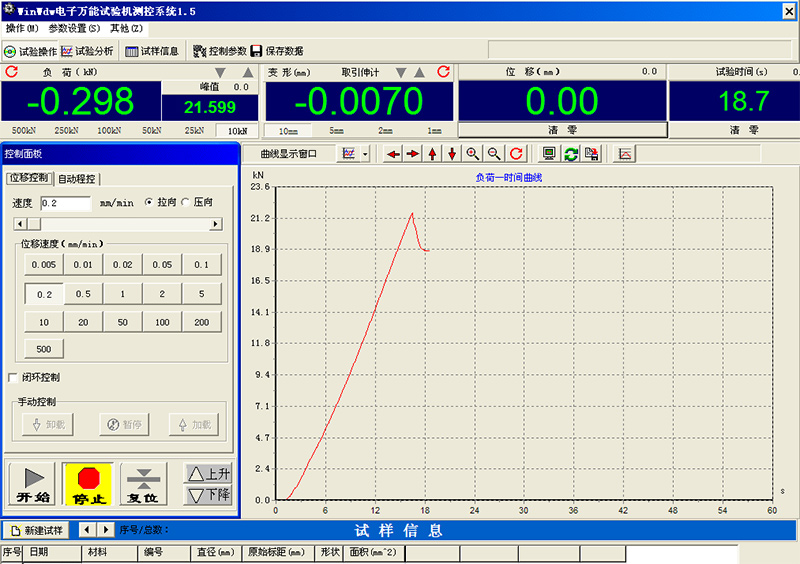
ການທົດສອບທັງໝົດສາມາດເຮັດໄດ້ໃນໜ້າຈໍຄອມພິວເຕີດ້ວຍການປ້ອນເມົ້າ.
(ສ່ວນຕິດຕໍ່ນີ້ແມ່ນເພື່ອອ້າງອີງເທົ່ານັ້ນ, ຂຶ້ນກັບຊອບແວສຸດທ້າຍ)
(2) ການຄວບຄຸມການຍ້າຍ.
(3) ການຄວບຄຸມໂປຣແກຣມອັດຕະໂນມັດສາມາດເລືອກຮູບແບບການຄວບຄຸມທີ່ຫຼາກຫຼາຍ.

(4) ລະບົບຜູ້ຊ່ຽວຊານອັດສະລິຍະທີ່ມີໂປຣແກຣມອັດຕະໂນມັດ. ຂະບວນການອັດຕະໂນມັດເຖິງ 50 ຂັ້ນຕອນ.
(5) ຊອບແວມີຟັງຊັນການຕັ້ງຄ່າການອະນຸຍາດການຈັດການຕາມລຳດັບ ເພື່ອຮັບປະກັນການນຳໃຊ້ຊອບແວຢ່າງປອດໄພ. ຊອບແວມີສາມລະດັບຂອງສິດທິການຄຸ້ມຄອງ, ຈາກຕ່ໍາຫາສູງ, ຜູ້ປະກອບການທົ່ວໄປ, ຜູ້ປະກອບການອາວຸໂສ, ບຸກຄະລາກອນການຄຸ້ມຄອງ, ຕາມລໍາດັບໂດຍລະຫັດຜ່ານຂອງຕົນເອງເພື່ອເຂົ້າສູ່ລະບົບ.
(6) ໜ້າຈໍສະແດງຜົນເສັ້ນໂຄ້ງ:
(7) ການວິເຄາະຂໍ້ມູນ:
(8) ເມນູສະຫຼັບເສັ້ນໂຄ້ງ
5. ປະຕິບັດການກຳນົດຄ່າລະບົບພື້ນຖານ
1) ການທົດສອບເຄື່ອງໂຮດ (ໂຄງສ້າງກອບປະຕູ,)
1.1 AC servo motor ແລະ servo driver
1.2 ເຊັນເຊີການໂຫຼດຄວາມແມ່ນຍໍາສູງ
1.3 ເຊັນເຊີແຮງບິດຄວາມແມ່ນຍໍາສູງ
1.4 Precision ball screw pair
1.5 ຕົວຫຼຸດຄວາມຊັດເຈນ
1.6 ລະບົບ Deceleration (arc tooth synchronous belt drive)
2) ເຄື່ອງຂະຫຍາຍສຽງທີ່ມີໂປຣແກຣມສອງຊ່ອງ (ຄວາມລະອຽດ 1/500000)
3) Winwdw ຊອບແວຄວບຄຸມພິເສດ
4) ຕົວເຂົ້າລະຫັດ Photoelectric
5) ອຸປະກອນເສີມ: ປັບແຕ່ງໂດຍລູກຄ້າ
6) ຄອມພິວເຕີຍີ່ຫໍ້ HP
7) ເຄື່ອງພິມ inkjet A4
8) ຂໍ້ມູນດ້ານວິຊາການ: ຄູ່ມືການສອນ, ຄູ່ມືຊອບແວ, ໃບຢັ້ງຢືນ, ລາຍການບັນຈຸ

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese























