1. ລາຍລະອຽດສິນຄ້າ:
SG30A ເຄື່ອງດູດຊັອກທີ່ຄວບຄຸມດ້ວຍໄມໂຄຄອມພີວເຕີ້ ຕົວຊີ້ວັດຄວາມເຫນື່ອຍລ້າ ເບຕົງທົດສອບແບບຄົບວົງຈອນ ສ່ວນໃຫຍ່ແມ່ນໃຊ້ກັບລົດຍົນທຸກຊະນິດ, ເຄື່ອງດູດຊັອກກະເປົ໋າລົມລະງັບລົມ, ພາຫະນະທີ່ຖືກດັດແປງ, SUV, ລົດຫຸ້ມເກາະ, ລົດເບົາ, ລົດບັນທຸກໜັກ, ATV ແລະທັງໝົດ ປະເພດຂອງຍານພາຫະນະທີ່ໃຊ້ໃນການທົດສອບຕົວຊີ້ວັດການດູດຊຶມການສັ່ນສະເທືອນ, ການທົດສອບຄວາມໄວເສັ້ນ, ການທົດສອບຊີວິດຄວາມເມື່ອຍລ້າ. ອຸປະກອນພິເສດຍັງສາມາດເຮັດໄດ້ເພື່ອປັບຕົວເຂົ້າກັບການທົດສອບຄວາມເມື່ອຍລ້າຂອງຕົວຢ່າງພິເສດ.
2. ຮູບສິນຄ້າ:

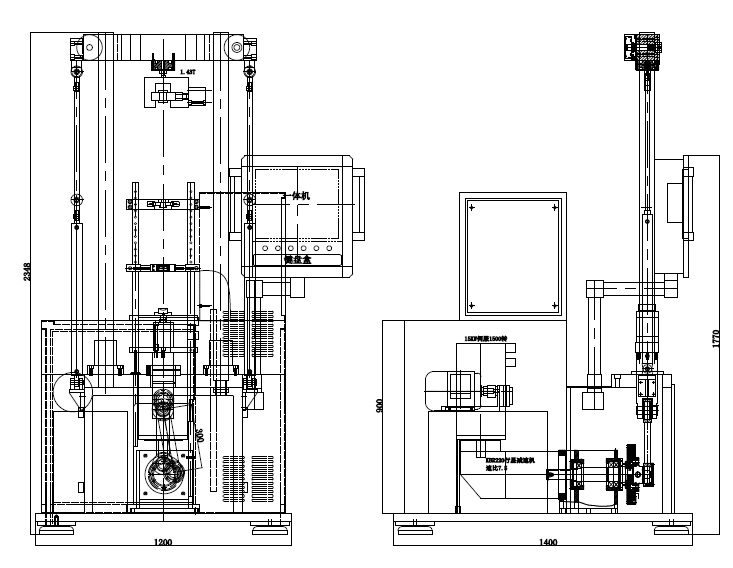
(ຮູບ 1)
(ຮູບ 2)
3. ລາຍລະອຽດໂຄງສ້າງອຸປະກອນ
ເຄື່ອງແມ່ນປະຕິບັດການສະຖານີດຽວ, ທັງຫມົດແມ່ນໂຄງສ້າງຖັນສອງແນວຕັ້ງ, ໂດຍກອບ, beam ເທິງແລະກົນໄກການຍົກ, damping force detection s ລະບົບ, ກົນໄກການຂັບ, ຊ໊ອກ ກົນໄກການກົດດັນກະບອກສູບດູດ, ຕົວຊີ້ວັດແລະຄວາມເຫນື່ອຍລ້າອຸປະກອນ, ລະບົບໄຮໂດຼລິກ, ບັດທີ່ໄດ້ມາ, ຄອມພິວເຕີ, ອຸດສາຫະກໍາ ຊອບແວການຄວບຄຸມແລະລະບົບການຄວບຄຸມເອເລັກໂຕຣນິກ, ໄວ plug ຮ່ວມທາງເລືອກ.
1. ກອບ: ການນໍາໃຊ້ຊັ້ນອຸດສາຫະກໍາເຫຼັກຊ່ອງທາງແລະເຄື່ອງເຊື່ອມແຜ່ນເຫຼັກແລະການຂະຫຍາຍຕົວກອບຮູບສີ່ຫລ່ຽມ, ການເຊື່ອມ bead ເປັນເອກະພາບແລະສວຍງາມ. ມີຄວາມເຂັ້ມແຂງພຽງພໍແລະ rigidity, ເພື່ອຮັບປະກັນການດໍາເນີນງານທີ່ປອດໄພ.
2. ກົນໄກການຍົກ ແລະ ລຳຕົວເທິງ: ປະກອບດ້ວຍ beam, ສອງ beam guide column, ສອງ cylinder ໄຮໂດຼລິກຍົກ, beam locking mechanism, hydraulic pressure, etc. cylinder hydraulic drives the cross beam up and down and hydraulically locks ມັນອັດຕະໂນມັດຢູ່ໃນຕໍາແຫນ່ງຢຸດ, ດັ່ງນັ້ນການຄວບຄຸມຄວາມສູງຂອງການຕິດຕັ້ງຂອງອຸປະກອນແລະເຮັດໃຫ້ເສັ້ນເລືອດຕັນໃນການທົດສອບທີ່ຕັ້ງຢູ່ໃນພາກກາງຂອງການຊ໊ອກ. ເສັ້ນເລືອດຕັນໃນດູດ.
3. Piston rod top tightening and pulling mechanism: ປະກອບດ້ວຍກະບອກໄຮໂດຼລິກ, ກົນໄກການຊີ້ນໍາແລະເຊື່ອມຕໍ່, ເຊັນເຊີບັງຄັບແລະ fixture, ແລະອື່ນໆ, ເພື່ອບັນລຸ piston rod clamping ກັບຕໍາແຫນ່ງເຮັດວຽກ.
4. ລະບົບກວດຈັບແຮງກັດ: ປະກອບດ້ວຍເຊັນເຊີແຮງ ແລະອຸປະກອນຈັບຄູ່ດ້ວຍມື. ເຊັນເຊີຜົນບັງຄັບໃຊ້ແມ່ນໃຊ້ສໍາລັບການຕິດຕາມເວລາທີ່ແທ້ຈິງຂອງແຮງ tensile ແລະ compressive ໃນລະຫວ່າງການເຄື່ອນທີ່ workpiece.
5. ກົນໄກການຂັບລົດ: ປະກອບດ້ວຍມໍເຕີ servo, ຕົວຫຼຸດ, ສາຍແອວເກຍ, ລໍ້ສາຍແອວເກຍ, ບ່ອນນັ່ງເບກ, spindle, crank, slider ແລະອຸປະກອນຄູ່ມື. ຕົວຫຼຸດມໍເຕີໃຫ້ພະລັງງານກັບພາກສ່ວນເຄື່ອນທີ່. ໂດຍຜ່ານການສົ່ງຂອງສາຍແອວຂອງແຂ້ວແລະ shaft ຕົ້ນຕໍ, ພະລັງງານໄດ້ຖືກໂອນໄປຫາກົນໄກການ slider ຂອງ handle crank ເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວຂອງ workpiece ໄດ້ຕາມ sine ໄດ້.
6. ກົນໄກການກົດຂອງກະບອກດູດຊັອກ: ປະກອບດ້ວຍເຊັນເຊີການຍ້າຍ, ກະບອກກົດ, ແຜ່ນກົດເທິງ, ຖັນຄູ່ມື, ພື້ນຖານ, ແລະອື່ນໆ. ແຜ່ນກົດເທິງແມ່ນຂັບເຄື່ອນໂດຍກະບອກນ້ໍາມັນເພື່ອເລື່ອນຂຶ້ນແລະລົງເພື່ອຮັບຮູ້. ການບີບອັດຂອງກະບອກດູດຊ໊ອກ. ເຊັນເຊີການຍ້າຍແມ່ນໃຊ້ເພື່ອຕິດຕາມເບິ່ງວ່າເສັ້ນສາຍປະກອບການກົດຂອງຄູ່ມືແມ່ນຢູ່ໃນສະຖານທີ່ຫຼືບໍ່.
7. ເຄື່ອງມືຕົວຊີ້ບອກ: ໂດຍເຄື່ອງມືຍຶດໄວຂອງເຄື່ອງດູດຊ໊ອກວົງແຫວນ ແລະເຄື່ອງມືຍຶດກະບອກສູບດູດຊັອກ, ເຄື່ອງມືຮັບຮອງເອົາໂຄງສ້າງການປ່ຽນແປງໄວ. ແຫວນຫ້ອຍເທິງຮັບຮອງເອົາໂຄງສ້າງທົ່ວໄປ, ແລະຫຼັງຈາກການວາງດ້ວຍມື, ການຍຶດກົນຈັກສອງຊະນິດໄດ້ຖືກຮັບຮອງເອົາ.
8. ລະບົບໄຮໂດຼລິກ: ປະກອບດ້ວຍຖັງນໍ້າມັນ, ປ່ຽງກວດ, ປ່ຽງປີ້ນ, ເຄື່ອງຄວບຄຸມຄວາມກົດດັນ, ມໍເຕີ, ປັ໊ມນ້ໍາມັນ, ການກັ່ນຕອງອາກາດ, ແລະອື່ນໆ, ເພື່ອສະຫນອງພະລັງງານສໍາລັບການຍຶດຕິດກັບ workpiece ແລະຍົກ beam ເທິງ. ປ່ຽງຄວບຄຸມຄວາມກົດດັນແລະເຄື່ອງວັດຄວາມດັນໄດ້ຖືກເພີ່ມຕາມລໍາດັບເພື່ອຄວບຄຸມແລະສະແດງຄວາມກົດດັນນ້ໍາມັນຂອງກະບອກ jacking ຄູ່ມືຂອງລະບົບໄຮໂດຼລິກແລະກະບອກ jacking ring lifting.
9. ບັດທີ່ໄດ້ມາ: ໃຊ້ສຳລັບການຮັບສັນຍານ ແລະ ການຫັນປ່ຽນ.
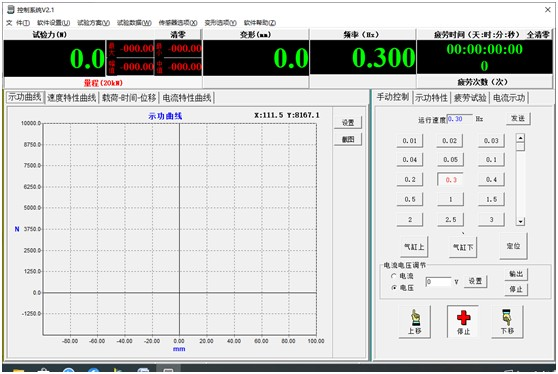
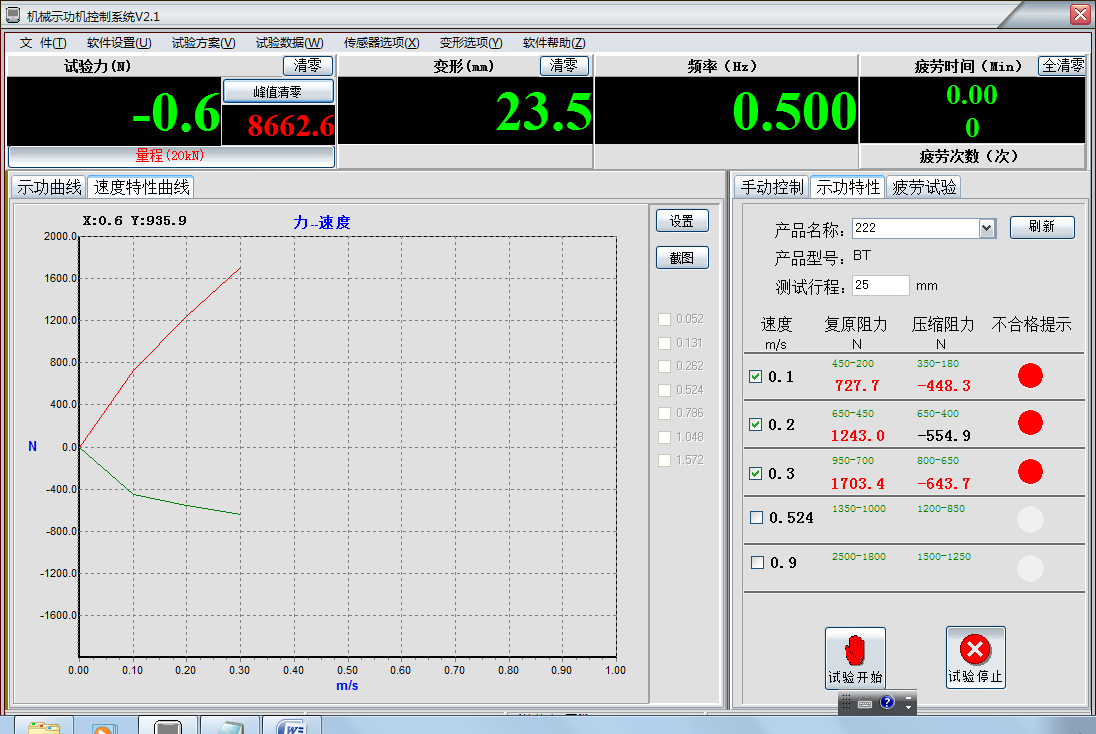
10. ຄອມພິວເຕີ (ໃຊ້ລະບົບ win7) : ໃຊ້ເພື່ອຮັບສັນຍານຂອງບັດທີ່ໄດ້ມາ, ແລະຜ່ານການຕິດຕັ້ງຊອບແວຄວບຄຸມອຸດສາຫະກໍາເພື່ອຄິດໄລ່, ວິເຄາະ, ແຕ້ມແຜນວາດ P-S ແລະແຜນວາດ P-V, ສະແດງແຮງດຶງສູງສຸດ. ແລະການບີບອັດການບີບອັດ, ກໍານົດ, ຂອບເຂດຈໍາກັດເທິງແລະຕ່ໍາ, ຈໍສະແດງຜົນທີ່ບໍ່ມີເງື່ອນໄຂແລະຕິດຕັ້ງໄຟຈະລາຈອນ. ຈໍສະແດງຜົນ.
11. ລະບົບການຄວບຄຸມໄຟຟ້າ: ໂດຍໄດເວີມໍເຕີ servo, ອົງປະກອບໄຟຟ້າ, ວົງຈອນໄຟຟ້າແລະກ່ອງຄວບຄຸມໄຟຟ້າແລະກຸ່ມອື່ນໆ. ຕົກລົງ. ຄູ່ມືແລະ ອັດຕະໂນມັດສອງໂຫມດປະຕິບັດການ, ອຸປະກອນເພີ່ມສະວິດຕົ້ນສະບັບ, ເພື່ອຮັບປະກັນການຕັ້ງກະແຈ.
12. ຊອບແວ: ການທົດສອບປະສິດທິພາບຂອງເຄື່ອງດູດຊັອກ ຟັງຊັນ ແລະຄຸນລັກສະນະຂອງລະບົບ:


1) ຟັງຊັນການປະຫຍັດການຕັ້ງຄ່າລະບົບ: ລະບົບການທົດສອບສາມາດບັນທຶກການຕັ້ງຄ່າແຮງ ແລະຄວາມໄວ;
2) ຟັງຊັນທົດສອບດ້ວຍຕົນເອງ: ສາມາດທົດສອບອຸປະກອນດ້ວຍຕົນເອງເພື່ອກວດເບິ່ງວ່າອຸປະກອນປົກກະຕິຫຼືບໍ່;
3) ຟັງຊັນການປັບການໃຊ້ງານ: ຍ້າຍບ່ອນຢູ່ຂອງເຊັນເຊີການຍ້າຍຂຶ້ນ ຫຼືລົງໄປຫາສູນເຊັນເຊີການຍ້າຍ;
4) ຟັງຊັນການປັບຕົວເຊັນເຊີ: ເຊັນເຊີບັງຄັບ, ເຊັນເຊີການຍ້າຍ ແລະຄວາມໄວສາມາດປັບໄດ້.
5) ການທໍາງານຂອງເຊັນເຊີບັງຄັບສູນ: ເມື່ອສ່ວນທ້າຍຕ່ໍາຂອງການຕິດຕັ້ງເຊັນເຊີຜົນບັງຄັບໃຊ້ໄດ້ຖືກທົດແທນ, ແລະເຊັນເຊີຜົນບັງຄັບໃຊ້ zeroing ແມ່ນຈໍາເປັນກ່ອນທີ່ຈະພື້ນທີ່ການທົດສອບຄັ້ງທໍາອິດທຸກໆມື້;
6) ຟັງຊັນການທົດສອບສະພາບດຽວ: ເຄື່ອງດູດຊ໊ອກສາມາດທົດສອບໄດ້ໃນສະພາບດຽວ, ການທົດສອບດ້ວຍມື ຫຼືການທົດສອບອັດຕະໂນມັດ. ຫຼັງຈາກການທົດລອງສໍາເລັດ, ຂໍ້ມູນການທົດລອງສາມາດຖືກບັນທຶກໄວ້, ອ່ານແລະພິມອອກ.
7) ຟັງຊັນການທົດສອບຫຼາຍສະພາບ: ການທົດສອບຫຼາຍສະພາບສາມາດດໍາເນີນຢູ່ໃນເຄື່ອງດູດຊ໊ອກ, ການທົດສອບດ້ວຍມື ຫຼືການທົດສອບອັດຕະໂນມັດ, ຫຼັງຈາກສໍາເລັດການທົດລອງ, ຂໍ້ມູນການທົດລອງສາມາດບັນທຶກ, ອ່ານ ແລະພິມອອກໄດ້. .
8) ຟັງຊັນການນັບ: ຈໍານວນຂອງເຄື່ອງດູດຊ໊ອກທີ່ທົດສອບທຸກໆ 24 ຊົ່ວໂມງ (ລວມທັງຈໍານວນຜະລິດຕະພັນທີ່ມີຄຸນນະພາບແລະຜະລິດຕະພັນທີ່ບໍ່ມີຄຸນນະພາບ), ແລະສາມາດບັນທຶກ, ອ່ານແລະພິມໄດ້.
9) ຜົນໄດ້ຮັບຂອງຕົວຊີ້ວັດສາມາດສ້າງບົດລາຍງານ (ລວມທັງຂໍ້ມູນ, ຮູບພາບ), ແລະຂໍ້ມູນຖືກເກັບໄວ້ໃນໄຟລ໌ Excle.
10) ການທົດສອບຄວາມເຫນື່ອຍລ້າ (ການທົດສອບການທໍາລາຍສາມາດເຮັດໄດ້ຕາມຄວາມຕ້ອງການໃນການທົດລອງ. ສາມາດບັນລຸຕົວເລກທີ່ກໍານົດໄວ້ກ່ອນຂອງຟັງຊັນປິດ, ເສັ້ນໂຄ້ງຂອງຄ່າບັງຄັບ, ການກວດສອບສູງສຸດ, ແລະອື່ນໆ)
11) ການທົດສອບ inductance: ພາຍໃຕ້ຄວາມຕ້ອງການຄວາມໄວດຽວກັນ, ກະແສໄຟຟ້າຫຼືແຮງດັນທີ່ແຕກຕ່າງກັນສາມາດຖືກມອບໃຫ້ເພື່ອທົດສອບການຟື້ນຕົວແລະການຕໍ່ຕ້ານການບີບອັດ.
12) ການໂຕ້ຕອບການອ້າງອີງຊອບແວ:
4. ຕົວກໍານົດການດ້ານວິຊາການຂອງອຸປະກອນ:
1. ຄ່າພະລັງງານສູງສຸດ: 30000N
2. ຄວາມໄວ: ສາມາດປັບໄດ້ລະຫວ່າງ 0.01~1m/s, ມໍເຕີເປັນມໍເຕີ servo, ຄວາມຖືກຕ້ອງສູງກວ່າ, ໂດຍຜ່ານຕົວຄວບຄຸມສາມາດຕັ້ງຄ່າໄດ້ຕາມຄວາມຕ້ອງການ, ຍັງສາມາດກໍານົດທາງລັດ, ເພື່ອບັນລຸໄດ້. ຄວາມສະດວກສະບາຍຂອງການນໍາໃຊ້ຄວາມໄວທົ່ວໄປ.
3. ການເດີນທາງ: 0~150mm (manual adjustable), ສະແດງການເດີນທາງທົດສອບ.
4. ແຮງດັນສູງສຸດ: ພຽງແຕ່ 1m/s 10000N.
5. ຈັງຫວະ: ສອງຈຸດຄວາມໄວ ≤12 ວິນາທີ/ຊິ້ນ;
6. ການທົດສອບຄວາມຖືກຕ້ອງ: 1%FS
7. ພື້ນທີ່ທົດສອບ: 900mm
5. ລາຍລະອຽດຂະບວນການຜະລິດອຸປະກອນ:
ຕິດຕັ້ງເຄື່ອງມືຕາມຊະນິດການຜະລິດ ແລະ ປັບຈັງຫວະຕາມຄວາມຕ້ອງການໃນການທົດສອບ → ເປີດການສະຫນອງພະລັງງານຂອງເຄື່ອງຕົ້ນຕໍແລະຄອມພິວເຕີເພື່ອເຂົ້າສູ່ໂຄງການທົດສອບ → ໃນສ່ວນ, ກົດປຸ່ມເລີ່ມຕົ້ນ → ອຸປະກອນບີບອັດກະບອກສູບດ້ານເທິງຈັດວາງບ່ອນເຮັດວຽກ → ກົນໄກການຂັບລົດຂັບຊິ້ນວຽກເພື່ອເລີ່ມຕົ້ນຕົວຊີ້ວັດ → ລະບົບຈໍສະແດງຜົນແຕ້ມແຜນວາດຕົວຊີ້ວັດຕາມລໍາດັບໃນການໂຕ້ຕອບດຽວກັນແລະ ສະແດງຜົນບັງຄັບໃຊ້ tensile ແລະການບີບອັດສູງສຸດ. ພາກສ່ວນທີ່ບໍ່ມີເງື່ອນໄຂອັດຕະໂນມັດປຸກແລະຕິດຕັ້ງຈໍສະແດງຜົນໄຟຈະລາຈອນ → ດັ່ງນັ້ນການເຮັດວຽກຂອງວົງຈອນສະຫຼັບ.
1. ປະເພດຕ່າງໆຂອງຕົວຊີ້ບອກການປ່ຽນແທນບ່ອນເຮັດວຽກ.
2. ປັບຕໍາແໜ່ງເບື້ອງຕົ້ນຂອງຄາບເທິງສໍາລັບຄວາມຍາວທີ່ແຕກຕ່າງກັນຂອງ workpieces.
3. workpiece stroke ທີ່ແຕກຕ່າງກັນ, ປັບຕໍາແຫນ່ງ eccentric.
6. ຄວາມຕ້ອງການຄວບຄຸມຄຸນນະພາບ:
1. ເຊັນເຊີຜົນບັງຄັບໃຊ້ (ໄລຍະການວັດແທກ 2T) ຄວາມຖືກຕ້ອງຂອງການຊໍ້າຄືນຕົວຂອງມັນເອງ 1%FS.
2. ໄລຍະເຊັນເຊີການຍ້າຍ: 0-200mm, ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຊ້ຳໆຂອງມັນເອງ ≥1%FS
3. ສາມາດກໍານົດຂອບເຂດເທິງແລະຕ່ໍາຂອງຄ່າແຮງ, ສັນຍານເຕືອນການສະແດງຫນ້າຈໍທີ່ບໍ່ມີເງື່ອນໄຂ.
4. ສາມາດກໍານົດຂອບເຂດເທິງແລະຕ່ໍາຂອງການຕິດຕັ້ງແຮງດັນຂອງຄູ່ມື, ສັນຍານເຕືອນການສະແດງຫນ້າຈໍທີ່ບໍ່ມີເງື່ອນໄຂ.
5. ຄ່າຂອງຜົນບັງຄັບໃຊ້ການກວດຫາຄວາມຜິດພາດແມ່ນ 1%.
7. ຄວາມຕ້ອງການອຸປະກອນຂະບວນການ:
1. ໃນຂະບວນການຜະລິດອຸປະກອນ, ຜູ້ສະໜອງຈະຕ້ອງສະໜອງອຸປະກອນ ແລະ ການແຕ້ມຮູບໃຫ້ຝ່າຍ A 1 ອັນ.
2. ປະສິດທິພາບຂອງເຄື່ອງຕ້ອງຕອບສະໜອງໄດ້ຕາມຄວາມຕ້ອງການຂອງຮູບແຕ້ມຂອງພັກ A.
3. ພື້ນຜິວຂອງເຄື່ອງມືຄວນໄດ້ຮັບການປິ່ນປົວດ້ວຍການຕ້ານການເກີດ rust ເຊັ່ນ: ສີດໍາຫຼື chrome plating.
4. ອຸປະກອນຄວນມີປ້າຍຊື່.
8. ການຄວບຄຸມເຄື່ອງຈັກ ແລະຄວາມຕ້ອງການຄວາມປອດໄພ:
1. ອຸປະກອນທີ່ມີປຸ່ມຢຸດສຸກເສີນ, ເພີ່ມຕາໜ່າງ ແລະເລີ່ມດ້ວຍມືທັງສອງ.
2. ລະບົບຄວບຄຸມອີເລັກໂທຣນິກນຳໃຊ້ການຄວບຄຸມ PLC ທີ່ສາມາດຕັ້ງໂປຣແກຣມໄດ້, ຄວບຄຸມແຮງດັນໄຟຟ້າ DC24V
3. ພາກສ່ວນການຫມຸນຂອງການປ້ອງກັນການຕິດຕັ້ງອຸປະກອນ.
9. ລາຍການການຕັ້ງຄ່າອຸປະກອນ (ຕື່ມຂໍ້ມູນໃສ່ຕາມການກຳນົດຄ່າຂອງຜູ້ຜະລິດເອງ)
| ໝາຍເລກ |
ຊື່ອົງປະກອບ |
ຍີ່ຫໍ້ |
ຂໍ້ມູນຈໍາເພາະ |
| 1 |
ເຈົ້າພາບ |
BeaconAuto |
ພັດທະນາຕົນເອງ |
| 2 |
Servo motor ແລະລະບົບຂັບ |
Huichuan servo |
25KW |
| 3 |
ຕົວຫຼຸດດາວເຄາະ |
Shanghai Fengxin |
ປະເພດງຽບ |
| 4 |
ຕູ້ປໍ້ານໍ້າມັນ |
ແຮງດັນຄົງທີ່ |
VPE-F12D-10 |
| 5 |
ປ່ຽງ solenoid |
Shanghai Huayuan |
4WE6 |
| 6 |
ເຊັນເຊີອຸນຫະພູມ |
Guangzhou |
-40 ອົງສາ ~150 ອົງສາ |
| 7 |
ກະບອກສູບໄຮໂດຼລິກ jacking |
Tianjin Jiagang |
CHTM-SD63*50N-S2 |
| 8 |
ເຊັນເຊີການໂຫຼດຄວາມແມ່ນຍໍາສູງ |
ປັບແຕ່ງເປັນພິເສດ (ປະເພດກັນກະທົບ) |
ປະເພດເວົ້າ 3T |
| 9 |
ເຊັນເຊີ Displacement LVDT |
ສະຖາບັນວິທະຍາສາດນ້ຳປັກກິ່ງ |
200mm |
| 10 |
ຕົວຄວບຄຸມກະດານ |
BeaconAuto |
ພັດທະນາຕົນເອງ |
| 11 |
ຊອບແວຄວບຄຸມ |
BeaconAuto |
ພັດທະນາຕົນເອງ |
| 12 |
ຄອມພິວເຕີທັງໝົດໃນໜຶ່ງດຽວ |
Dell/Lenovo |
ມາດຕະຖານ |
| 13 |
ເຄື່ອງພິມ |
A4 inkjet/HP |
ມາດຕະຖານ |
| 14 |
ເຄື່ອງໃຊ້ໄຟຟ້າແຂງແຮງ |
ຍີ່ຫໍ້ແຖວທຳອິດພາຍໃນປະເທດ |
ຊົ່ວຄາວ |
| 15 |
ທໍ່ນ້ຳມັນແຮງດັນສູງ |
ນຳເຂົ້າ |
ຊົ່ວຄາວ |
7. ເງື່ອນໄຂການນຳໃຊ້ ແລະຄວາມຕ້ອງການດ້ານສິ່ງແວດລ້ອມ
1. ຊ່ວງຄວາມຜັນຜວນຂອງແຮງດັນການສະຫນອງພະລັງງານ: 380±15%
2. ແຫຼ່ງອາກາດ: ≥4bar, ການໄຫຼ 20L/ນາທີ
3. ອຸນຫະພູມສະພາບແວດລ້ອມໃນການເຮັດວຽກ: 5~40℃
4. ສະຖານທີ່ຕິດຕັ້ງມີຈໍານວນຈໍາກັດ, ຮູບແບບຍົນຂອງເຄື່ອງຈັກທັງຫມົດ.
5. ຍີ່ຫໍ້ນ້ຳມັນໄຮໂດຼລິກ: N46

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese











