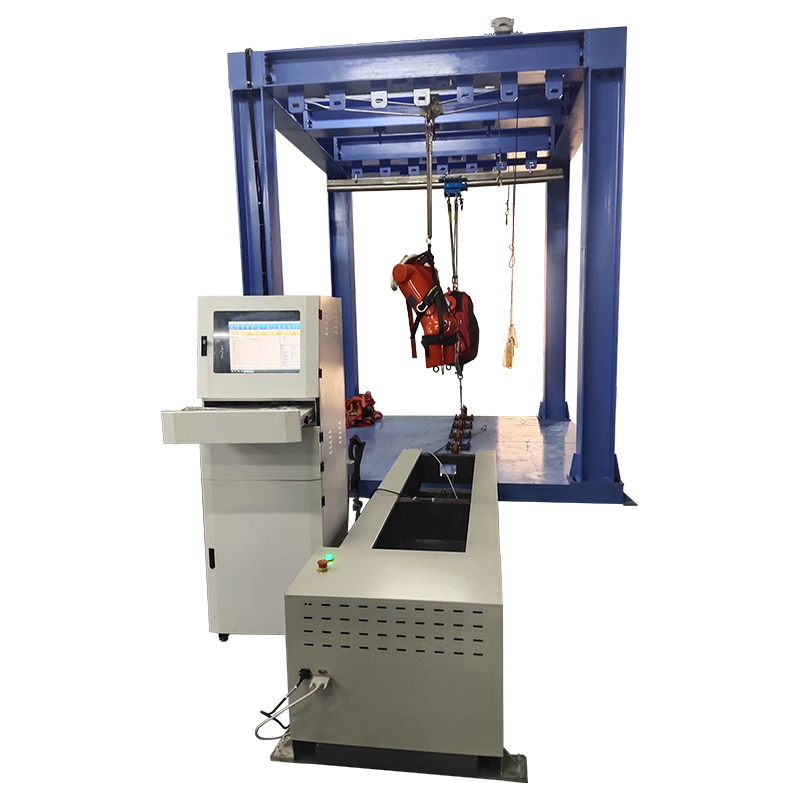
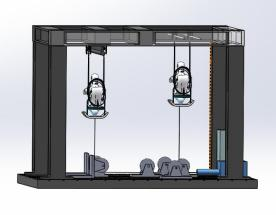
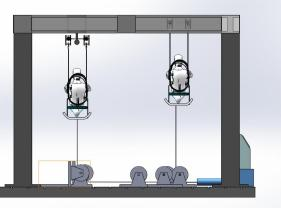
1. ອຸປະກອນທີ່ໃຊ້:
ລະບົບການທົດສອບກົນຈັກແມ່ນເຫມາະສົມສໍາລັບການທົດສອບກົນຈັກທີ່ສົມບູນແບບຂອງເຊືອກຄວາມປອດໄພ, sling, ແລະອື່ນໆ. ມັນສາມາດສໍາເລັດການໂຫຼດສູງສຸດ, ການຮັກສາການໂຫຼດໃນໄລຍະຍາວພາຍໃຕ້ການໂຫຼດຄົງທີ່, ຄວາມເມື່ອຍລ້າຂອງວົງຈອນຕ່ໍາພາຍໃຕ້ການໂຫຼດ, ຜົນກະທົບຢ່າງໄວວາ. ແລະການທົດສອບອື່ນໆ.

 {7}608209
{7}608209
2. ຕົວກໍານົດການວັດແທກ:
1. ແຮງທົດສອບສູງສຸດ: 50kN
2. ໄລຍະການວັດແທກຜົນບັງຄັບໃຊ້: 0.4%--100%.
3. ການທົດສອບຄວາມຖືກຕ້ອງຂອງຕົວຊີ້ວັດຜົນບັງຄັບໃຊ້: ດີກວ່າ ±1%
4. Test force resolution :1/500000
5. ຄວາມຖືກຕ້ອງຂອງການວັດແທກການກະຈາຍ Beam: ຄວາມລະອຽດສູງກ່ວາ 0.002mm
6. ຄວາມຖືກຕ້ອງຂອງການວັດແທກການບິດເບືອນ: ±1%
7. ໄລຍະຄວາມໄວການທົດສອບ: 0.001-500mm / ນາທີ, ລະບຽບຄວາມໄວ stepless
8. ຄວາມແມ່ນຍຳຂອງການຄວບຄຸມຄວາມໄວ : ±1%(0.0002~50mm/min); ບວກ ຫຼື ລົບ 0.5% (50 ~ 3500 ມມ/ນາທີ)
9. ຜົນບັງຄັບໃຊ້ຄົງທີ່, ການບິດເບືອນຄົງທີ່, ໄລຍະການຄວບຄຸມການເຄື່ອນທີ່ຄົງທີ່: 0.2%-100%FS
10. ຜົນບັງຄັບໃຊ້ຄົງທີ່, ການບິດເບືອນຄົງທີ່, ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມການເຄື່ອນຍ້າຍຄົງທີ່:
ເມື່ອຄ່າທີ່ຕັ້ງໄວ້ແມ່ນ <10%FS, ຄ່າທີ່ກໍານົດໄວ້ຢູ່ພາຍໃນ ±1.0%
ເມື່ອຄ່າທີ່ກໍານົດໄວ້ແມ່ນ ≥10%FS, ຄ່າທີ່ກໍານົດໄວ້ແມ່ນພາຍໃນ ±0.1%
11. ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມອັດຕາການເສຍຮູບ: ອັດຕາ <0.05%FS ຢູ່ພາຍໃນຄ່າທີ່ກໍານົດໄວ້ ±2.0%
ອັດຕາ ≥0.05%FS ຢູ່ໃນຄ່າທີ່ກໍານົດໄວ້ ±0.5%
12. ພື້ນທີ່ທົດສອບ: 3000*3000*3500
13. Drawing stroke: 1000mm
14. ໂໝດການໂຫຼດ: ການໂຫຼດ servo motor
ສິບຫ້າ. ໂຕະລຸ່ມ: 2000*2000
16. ການສະຫນອງພະລັງງານ: ໄລຍະດຽວ, 220V± 10%,50Hz, ພະລັງງານ: 750W
17. ສະພາບແວດລ້ອມໃນການເຮັດວຽກ: ອຸນຫະພູມຫ້ອງ -35 ℃, ຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງບໍ່ເກີນ 80%
18. ຂະໜາດເຈົ້າພາບ: 3100×3100×3550mm (ກຳນົດ)
19. ນ້ຳໜັກຄຳ: 2100 kg
3. ການຕັ້ງຄ່າຜະລິດຕະພັນ:
1, ຊຸດຂອງກອບເຈົ້າພາບ
2, ມໍເຕີ servo ດິຈິຕອນເຕັມແລະໄດເວີ servo; ຊຸດຂອງ
3, ເຊັນເຊີການໂຫຼດຄວາມແມ່ນຍໍາສູງ; 50kn one
4, ໂຫຼດໂມດູນ; ຊຸດ
5, photoelectric encoder (2500 ເສັ້ນ, ໃນຕົວ); 1
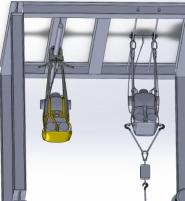
6, fixture: hook type 1 set
7, ຊຸດຂອງສາມລະບົບການວັດແທກວົງປິດ, ການນໍາໃຊ້ຜົນບັງຄັບໃຊ້, ການເຄື່ອນຍ້າຍ, ຄວາມເຄັ່ງຕຶງແລະວິທີການຄວບຄຸມອື່ນໆ, ຂະບວນການທົດສອບສາມາດສະແດງໄດ້ໃນເວລາທີ່ແທ້ຈິງ force-displacement, force-time, stress-strain ແລະ ເສັ້ນໂຄ້ງການທົດສອບອື່ນໆ, ແລະອັດຕະໂນມັດສາມາດໄດ້ຮັບການໂຫຼດສູງສຸດ, ຄວາມເຂັ້ມແຂງ tensile, elongation ໃນ break ແລະຕົວກໍານົດການຜົນໄດ້ຮັບອື່ນໆ.

8, ຄອມພິວເຕີຍີ່ຫໍ້ HP, ຈໍ LCD 21 ນິ້ວ;
9, ເຄື່ອງພິມ: ເຄື່ອງພິມ inkjet ສີ HPA4;
10, ຊອບແວທົດສອບພິເສດ: ສາມາດປະຕິບັດ GB, ISO, JIS, DIN, ASTM ແລະມາດຕະຖານການທົດສອບອື່ນໆ, ເປີດຢ່າງເຕັມທີ່, ມີພະລັງ, ໃຊ້ງານງ່າຍ, ສະຫນອງຊອບແວການຍົກລະດັບຟຣີ, ແລະສາມາດແກ້ໄຂຊອບແວການທົດສອບໄດ້ຕາມ ກັບຄວາມຕ້ອງການຂອງຜູ້ໃຊ້.
4. ໜ້າທີ່ ແລະຄຸນສົມບັດຂອງຜະລິດຕະພັນ:
1. ຄອມພິວເຕີແມ່ຂ່າຍ
1.1 Full Digital AC servo motor ແລະ servo driver, ອັດຕາສ່ວນຄວາມໄວເຖິງ 1:100,000; ລະບົບມີຄວາມແມ່ນຍໍາໃນການຄວບຄຸມສູງ, ຄວາມຫມັ້ນຄົງທີ່ດີ, ການດໍາເນີນງານທີ່ຫມັ້ນຄົງແລະເຊື່ອຖືໄດ້, ການຕອບສະຫນອງໄວ, ສຽງຕ່ໍາ, ແລະມີ overload, overcurrent, overvoltage, undervoltage, overheating, ຢຸດຜິດປົກກະຕິ, ເຕືອນຄວາມຜິດແລະຫນ້າທີ່ປ້ອງກັນທີ່ສົມບູນແບບອື່ນໆ, ແລະສາມາດປັບຕົວກໍານົດການຕາມ. ຮູບແບບທີ່ແຕກຕ່າງກັນແລະປະເພດການທົດສອບ, ດັ່ງນັ້ນລະບົບ servo ເຮັດວຽກຢູ່ໃນສະພາບທີ່ດີທີ່ສຸດ, ການນໍາໃຊ້ຮູບແບບການຄວບຄຸມຕໍາແຫນ່ງຂອງລະບົບ servo. ຫນ່ວຍງານການໂຕ້ຕອບແມ່ນດິຈິຕອນເພື່ອເອົາຊະນະສູນ drift ແລະຄວາມໄວຕ່ໍາ instability ທີ່ເກີດຈາກ loop ຄວາມໄວ.
1.2 ໜ່ວຍການໂຫຼດຮັບຮອງເອົາການອອກແບບແບບໂມດູລາ ແລະສາມາດເຄື່ອນຍ້າຍໄດ້ເພື່ອຕອບສະໜອງຄວາມຕ້ອງການຂອງຕຳແໜ່ງການໂຫຼດທີ່ແຕກຕ່າງກັນ.
2. ລະບົບການວັດແທກ ແລະການຄວບຄຸມ, ຊອບແວປະຕິບັດງານ ແລະລະບົບປະມວນຜົນຂໍ້ມູນ
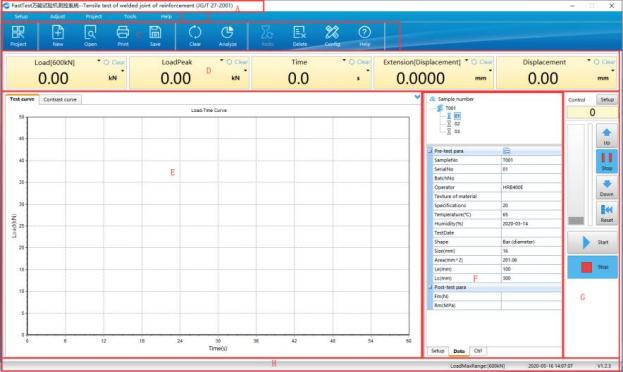
ສ່ວນຕິດຕໍ່ຫຼັກຂອງຊອບແວ
ກະດານຈັດຫາຂໍ້ມູນທີ່ມີຄວາມຊັດເຈນສູງ (ການໄດ້ມາຂໍ້ມູນ A/D 24-bit) ສາມາດບັນລຸການປັບຕົວແບບດິຈິຕອລເຕັມຮູບແບບ, ການຂະຫຍາຍຄວາມຊັດເຈນສູງ ແລະການຄວບຄຸມທີ່ຊັດເຈນ (ສ້າງໃນຄອມພິວເຕີ), ເທັກໂນໂລຍີການເຊື່ອມໂຍງຊິບຂັ້ນສູງ, ຄວາມຊັດເຈນສູງ ± 300,000 ບັດໄດ້ມາລະຫັດ, ດັ່ງນັ້ນຄວາມແມ່ນຍໍາຂອງ sensor ການວັດແທກທີ່ສຸດ. ມັນມີຄວາມໄດ້ປຽບຂອງການເຊື່ອມໂຍງສູງ, ຄວາມຫມັ້ນຄົງແລະຄວາມຫນ້າເຊື່ອຖື, ແລະງ່າຍຕໍ່ການນໍາໃຊ້. ຊອບແວຄວບຄຸມສາມາດອັດຕະໂນມັດ modulus elastic, ຜົນຜະລິດ, ຄວາມເຂັ້ມແຂງ tensile, ຄວາມເຂັ້ມແຂງ breaking ແລະຂໍ້ມູນທໍາມະດາອື່ນໆ, ແລະອັດຕະໂນມັດສາມາດຄິດໄລ່ຜົນບັງຄັບໃຊ້, ຄວາມກົດດັນ, ການຍ້າຍອອກ, deformation ແລະຂໍ້ມູນອື່ນໆໃນຈຸດທີ່ກໍານົດໄວ້ໃນຂະບວນການທົດສອບ.
2.1 ການລຶບສູນອັດຕະໂນມັດ: ຫຼັງຈາກການທົດສອບເລີ່ມຕົ້ນ, ລະບົບການວັດແທກຈະປັບອັດຕະໂນມັດເປັນສູນ;
2.2 ການຢຸດອັດຕະໂນມັດ: ຫຼັງຈາກຕົວຢ່າງຖືກແຍກ, ລໍາລຽງເຄື່ອນທີ່ຈະຢຸດອັດຕະໂນມັດ;
2.3 ການປັບທຽບອັດຕະໂນມັດ: ລະບົບອັດຕະໂນມັດສາມາດຮັບຮູ້ອັດຕະໂນມັດການປັບຕົວຊີ້ບອກຄວາມຖືກຕ້ອງຂອງຄ່າ;
2.4 ການເກັບຮັກສາອັດຕະໂນມັດ: ການເກັບຮັກສາຂໍ້ມູນການທົດສອບອັດຕະໂນມັດ ແລະເງື່ອນໄຂການທົດສອບເພື່ອປ້ອງກັນການສູນເສຍຂໍ້ມູນທີ່ເກີດຈາກການລືມບ່ອນເກັບມ້ຽນ;
2.5 ການປ່ຽນແປງຄວາມໄວອັດຕະໂນມັດ: ໃນລະຫວ່າງການທົດສອບ, ຄວາມໄວການເຄື່ອນຍ້າຍຂອງລໍາແສງສາມາດປ່ຽນແປງໄດ້ໂດຍອັດຕະໂນມັດຕາມໂຄງການທີ່ກໍານົດໄວ້ກ່ອນ, ຫຼືດ້ວຍຕົນເອງ;
2.6 ການຄວບຄຸມອັດຕະໂນມັດ: ອີງຕາມຄວາມຕ້ອງການການທົດສອບ, ຄວາມໄວການທົດສອບ, ການຍ້າຍ, ເມື່ອຍແລະຮູບແບບການຄວບຄຸມປິດອື່ນໆສາມາດເລືອກໄດ້;
2.7 ການຄວບຄຸມໂປຣແກຣມ: ຜູ້ໃຊ້ສາມາດປັບແຕ່ງໂປຣແກຣມຄວບຄຸມຫຼາຍຂັ້ນຕອນຕາມຄວາມຕ້ອງການ ແລະອີງຕາມການກໍານົດສະເພາະຂອງການຂຽນໂປຼແກຼມ.
2.8 ການບັນທຶກອັດຕະໂນມັດ: ຫຼັງຈາກການທົດສອບ, ຂໍ້ມູນການທົດສອບ ແລະເສັ້ນໂຄ້ງຈະຖືກບັນທຶກໂດຍອັດຕະໂນມັດ;
2.9 batch test: ສໍາລັບຕົວຢ່າງທີ່ມີພາລາມິເຕີດຽວກັນ, batch ຂອງການທົດສອບສາມາດສໍາເລັດຢ່າງຕໍ່ເນື່ອງຫຼັງຈາກການຕັ້ງຄ່າຫນຶ່ງ;
2.10 ການວິເຄາະອັດຕະໂນມັດ: ວິເຄາະຂໍ້ມູນການທົດສອບອັດຕະໂນມັດຕາມຄວາມຕ້ອງການມາດຕະຖານທີ່ກ່ຽວຂ້ອງ.
2.11 Curve traversal: ຫຼັງຈາກການທົດສອບສໍາເລັດ, ເສັ້ນໂຄ້ງສາມາດວິເຄາະໄດ້ແລະຂໍ້ມູນທີ່ສອດຄ້ອງກັນກັບແຕ່ລະຈຸດໃນເສັ້ນໂຄ້ງການທົດສອບສາມາດພົບໄດ້ດ້ວຍຫນູ;
2.12 ການເລືອກເສັ້ນໂຄ້ງ: ຄວາມກົດດັນ - ເມື່ອຍ, ແຮງ - ການຍ້າຍ, ໄລຍະເວລາບັງຄັບ, ເສັ້ນໂຄ້ງການຍ້າຍ - ເວລາສາມາດເລືອກໄດ້ຕາມຄວາມຕ້ອງການຂອງການສະແດງແລະການພິມ; ແລະມັນສາມາດສະທ້ອນໃຫ້ເຫັນຢ່າງຊັດເຈນເຖິງຂະບວນການລົ້ມເຫຼວຂອງຕົວຢ່າງພາຍໃຕ້ການປະຕິບັດຂອງຄວາມກົດດັນແລະການວິເຄາະຂໍ້ມູນຂອງທຸກໆຈຸດຂອງຕົວຢ່າງ.
2.13 ການວິເຄາະອັດຕະໂນມັດ: ພາກສ່ວນໃດນຶ່ງຂອງເສັ້ນໂຄ້ງການທົດສອບສາມາດຂະຫຍາຍໄດ້ໃນທ້ອງຖິ່ນ.
2.14 ການປະມວນຜົນເປັນຊຸດ: ສະຫຼຸບ ແລະປຽບທຽບຂໍ້ມູນການທົດສອບຫຼາຍອັນ ແລະເສັ້ນໂຄ້ງ ແລະສະແດງ ແລະພິມພວກມັນ.
2.15 ບົດລາຍງານການທົດສອບ: ການແກ້ໄຂລາຍງານຫຼາຍວິທີການ (ExselWorld Advanced customization), ຜູ້ໃຊ້ສາມາດແກ້ໄຂຮູບແບບບົດລາຍງານຕາມຄວາມຕ້ອງການຂອງເຂົາເຈົ້າ.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese