1. ແນະນຳ:
Electro-hydraulic servo dynamic and static universal testing machine is widely used in dynamic and static mechanical properties test of material and parts, including tensile, compression, low cycle and high cycle fatigue test of material and parts. ການທົດສອບກົນຈັກອຸນຫະພູມສູງແລະຕ່ໍາສາມາດປະຕິບັດໄດ້ກັບຫ້ອງອຸນຫະພູມສູງແລະຕ່ໍາ.

ໃນລະຫວ່າງຂະບວນການພັດທະນາແລະພັດທະນາຂອງ electro-hydraulic servo dynamic ແລະ static universal testing series, ມັນ adopts ປະສົບການການພັດທະນາຂອງບໍລິສັດເຄື່ອງທົດສອບ electro-hydraulic servo dynamic ທີ່ມີຊື່ສຽງລະດັບສາກົນ, ຮັບຮອງເອົາແນວຄວາມຄິດການພັດທະນາຂອງ "unization, modularization ແລະມາດຕະຖານ", ດູດເອົາເຕັກໂນໂລຢີເຄື່ອງທົດສອບແບບເຄື່ອນໄຫວຂອງ electro-hydraulic servo ກ້າວຫນ້າທາງດ້ານສາກົນ, ແລະຖືກອອກແບບຕາມການນໍາໃຊ້ຕົວຈິງ. ສະຖານະການຂອງຜູ້ໃຊ້ພາຍໃນ. ອົງປະກອບສະຫນັບສະຫນູນທີ່ສໍາຄັນຂອງເຄື່ອງທົດສອບ electro-hydraulic servo dynamic ໄດ້ຖືກຄັດເລືອກຈາກຍີ່ຫໍ້ທີ່ມີຊື່ສຽງຂອງຜະລິດຕະພັນພາຍໃນແລະຕ່າງປະເທດທີ່ຄ້າຍຄືກັນ. ຄວາມຫມັ້ນຄົງແລະຄວາມຫນ້າເຊື່ອຖືຂອງລະບົບໄດ້ຖືກປັບປຸງຢ່າງຫຼວງຫຼາຍ, ຫນ່ວຍງານທີ່ສໍາຄັນແລະອົງປະກອບຂອງລະບົບໄດ້ຖືກຜະລິດດ້ວຍເຕັກໂນໂລຢີທີ່ກ້າວຫນ້າຂອງສາກົນໃນປະຈຸບັນ, ແລະການປະຕິບັດໂດຍລວມຂອງລະບົບການທົດສອບທັງຫມົດແມ່ນທຽບເທົ່າກັບລະດັບດ້ານວິຊາການຂອງບໍລິສັດເຄື່ອງທົດສອບແບບເຄື່ອນໄຫວທີ່ມີຊື່ສຽງລະດັບສາກົນ. . ຜະລິດຕະພັນຊຸດນີ້ມີຄຸນລັກສະນະຂອງການນໍາໃຊ້ງ່າຍ, ຄວາມແມ່ນຍໍາໃນການຄວບຄຸມສູງ, ຄວາມຫນ້າເຊື່ອຖືທີ່ດີແລະອື່ນໆ.

Embedded channel fatigue testing machine is one of the series of static and dynamic testing machine products develop by our company. ເຈົ້າພາບເຄື່ອງທົດສອບ, ສະຖານີສູບ servo ຄວາມກົດດັນຄົງທີ່, clamp ໄຮໂດຼລິກແລະອົງປະກອບທີ່ສໍາຄັນອື່ນໆໄດ້ຖືກອອກແບບແລະຜະລິດສໍາລັບບໍລິສັດຂອງພວກເຮົາ, ປ່ຽງ servo, ປະທັບຕາແລະພາກສ່ວນອື່ນໆທີ່ຊື້ທີ່ສໍາຄັນແມ່ນໄດ້ຮັບການຄັດເລືອກຜະລິດຕະພັນທີ່ຄ້າຍຄືກັນລະຫວ່າງປະເທດແລະພາຍໃນປະເທດຂອງຍີ່ຫໍ້ທີ່ມີຊື່ສຽງ, ປັບປຸງຄວາມຫມັ້ນຄົງຢ່າງຫຼວງຫຼາຍແລະ ຄວາມຫນ້າເຊື່ອຖືຂອງລະບົບ, ປະສິດທິພາບໂດຍລວມຂອງເຄື່ອງທົດສອບແລະລະດັບເຕັກໂນໂລຊີຜະລິດຕະພັນກ້າວຫນ້າທາງດ້ານສາກົນ. ມັນຕອບສະຫນອງຂໍ້ກໍານົດຂອງ TBT/T3329-2013, X1-J1-2017, TBT/T2074-2010 ແລະມາດຕະຖານອື່ນໆທີ່ກ່ຽວຂ້ອງ.


2. ລາຍລະອຽດໂປຣແກຣມ:
ເຄື່ອງທົດສອບໄຟຟ້າ 50kN electro-hydraulic servo dynamic ແລະ static universal ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍເຄື່ອງຈັກຕົ້ນຕໍ (50kN servo linear actuator), chuck ໄຮໂດຼລິກແລະໂມດູນໄດໄຮໂດຼລິກຂອງມັນ, ຊຸດຂອງສະຖານີປັ໊ມ servo ຄວາມກົດດັນຄົງທີ່ (ການໄຫຼ ອັດຕາການ 36L / min, ຄວາມກົດດັນຂອງລະບົບ 21MPa), ເຕັມດິຈິຕອນການຄວບຄຸມ servo ດຽວຊ່ອງແລະ ເຄື່ອງພິມຄອມພິວເຕີ, ຊອບແວທົດສອບທີ່ກ່ຽວຂ້ອງ, ອຸປະກອນເສີມທີ່ຈໍາເປັນອື່ນໆ.
 {50351388} DST136558} {503512316} ຊ່ອງ Embedded Test Machine " height="500" />
{50351388} DST136558} {503512316} ຊ່ອງ Embedded Test Machine " height="500" />
ເບິ່ງຮູບ. 1 ແລະ 2 ສໍາລັບແຜນວາດຫຼັກການເຮັດວຽກ ແລະແຜນວາດຕັນຄວບຄຸມ.
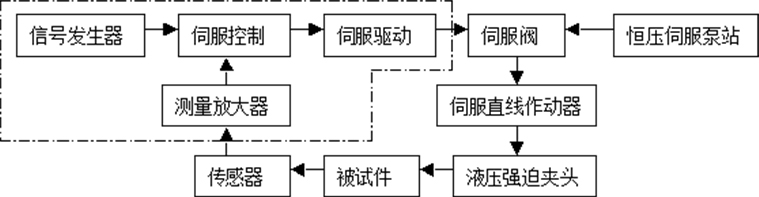
ຮູບທີ 1 ແຜນວາດຫຼັກການເຮັດວຽກຂອງລະບົບ
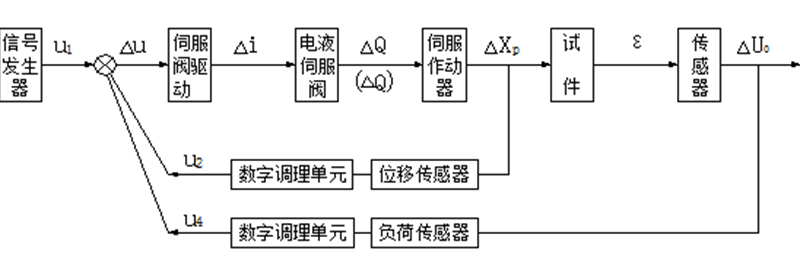
ຮູບທີ 2 ແຜນວາດບລັອກລະບົບຄວບຄຸມ

ຮູບທີ 3: ຮູບພາບຂອງຄອມພິວເຕີແມ່ຂ່າຍ (ຂຶ້ນກັບວັດຖຸຕົວຈິງ)
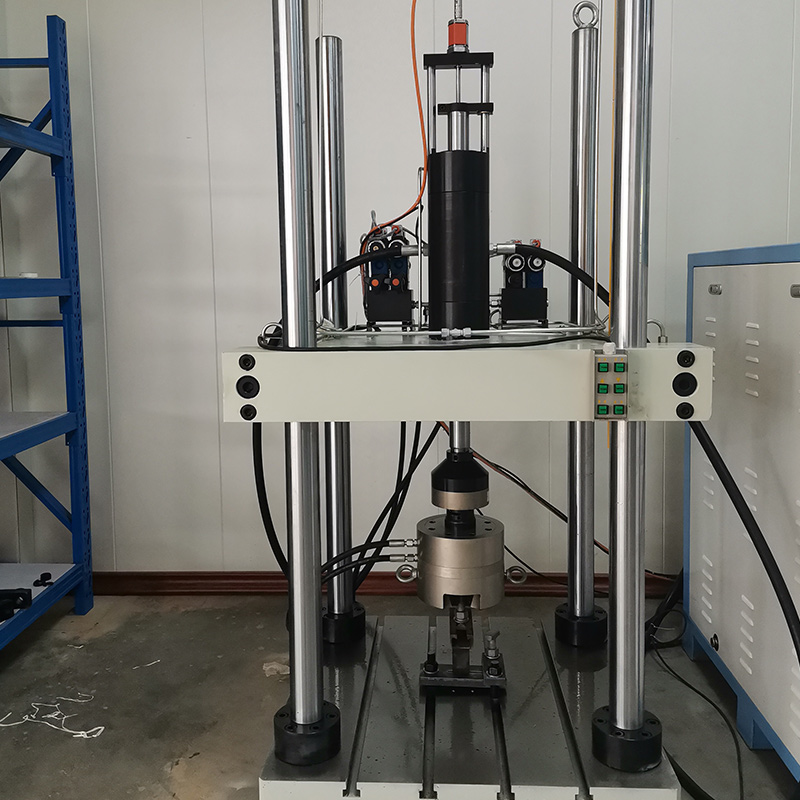
1, ເຄື່ອງຕົ້ນຕໍ: ເຄື່ອງຕົ້ນຕໍແມ່ນໂຄງສ້າງກອບຖັນຄູ່, 50kN servo linear actuator ຖືກວາງໄວ້ພາຍໃນກອບເຄື່ອງຈັກຕົ້ນຕໍ. chuck ໄຮໂດຼລິກບັງຄັບແມ່ນ mounted ເທິງຂອງ beam ແລະ rod actuator ຕາມລໍາດັບ. ການປັບ beam ເຈົ້າພາບຮັບຮອງເອົາການຍົກໄຮໂດຼລິກ, clamping ບົບໄຮໂດຼລິກ, ໂຄງສ້າງການປ່ອຍ elastic, ເພື່ອຮັບປະກັນວ່າ beam ມີຄວາມຫມັ້ນຄົງແລະເຊື່ອຖືໄດ້ໃນລະຫວ່າງການທົດສອບ, ແລະເພື່ອຮັບປະກັນວ່າ beam ຍັງຖືກລັອກຢູ່ໃນສະຖານະທີ່ບໍ່ແມ່ນການທົດສອບ. ດ້ານນອກຂອງຖັນແມ່ນໄດ້ຮັບການປິ່ນປົວດ້ວຍການເຄືອບ chromium ແຂງ, ເຊິ່ງປະສິດທິຜົນສາມາດເພີ່ມຄວາມສາມາດໃນການຕ້ານການສວມໃສ່ຂອງຖັນ, ປັບປຸງຄວາມສາມາດໃນການຕ້ານການກັດກ່ອນ, ແລະເພີ່ມຄວາມງາມຂອງຮ່າງກາຍຕົ້ນຕໍ.
ເຄື່ອງຈັກຕົ້ນຕໍຂອງເຄື່ອງທົດສອບມີລັກສະນະໂຄງສ້າງທີ່ຫນາແຫນ້ນ, ຍົກງ່າຍຂອງ beam, ຄວາມແຂງຂອງກອບສູງ, ການຍຶດຫມັ້ນຂອງຕົວຢ່າງ, ຄວາມເປັນກາງທີ່ດີ, ການຍຶດສະດວກ, ແລະອື່ນໆ, ແລະສາມາດເປັນ. ໂດຍມີອຸປະກອນຕ່າງໆ ແລະອຸປະກອນທົດສອບສິ່ງແວດລ້ອມເພື່ອຂະຫຍາຍການເຮັດວຽກຂອງການທົດສອບ.
1.1, ເຄື່ອງຕົ້ນຕໍແມ່ນໂຄງສ້າງກອບສີ່ຖັນ, ດ້ານນອກຂອງສີ່ຖັນຮັບຮອງເອົາການເຄືອບ chromium ແຂງເພື່ອປັບປຸງຮູບລັກສະນະຂອງລະດັບຄວາມງາມຕື່ມອີກ, ໃນຂະນະທີ່ປັບປຸງຄວາມສາມາດໃນການຕ້ານການກັດກ່ອນ;
1.2, beam ສາມາດຍົກໄດ້ເພື່ອປັບພື້ນທີ່ການທົດສອບ, ການປັບ beam ຮັບຮອງເອົາການຍົກໄຮໂດຼລິກ, clamping ບົບໄຮໂດຼລິກ, ໂຄງສ້າງການປ່ອຍ elastic, ເພື່ອຮັບປະກັນວ່າການທົດສອບມີຄວາມຫມັ້ນຄົງແລະເຊື່ອຖືໄດ້, ແລະຮັບປະກັນວ່າ beam ຍັງຖືກລັອກ. ຢູ່ໃນສະຖານະທີ່ບໍ່ແມ່ນການທົດສອບ;
1.3. ການເຄື່ອນໄຫວຂອງ beam (ຍົກແລະ locking) ແມ່ນຄວບຄຸມໂດຍໂມດູນຂັບ beam, ສອງກະບອກ clamping ແລະສອງ cylinders ຍົກໄດ້ຖືກປະສານງານເພື່ອສໍາເລັດການເຮັດວຽກ, ແລະໂມດູນຂັບໄດ້ຖືກຄວບຄຸມໂດຍວາວ rotary ຄູ່ມືພິເສດທີ່ມີການຮົ່ວໄຫຼສູນ, ເຊິ່ງສາມາດຮັບປະກັນການ. ຄວາມຫນ້າເຊື່ອຖືຂອງການທົດສອບ;
1.4, ເຊັນເຊີການໂຫຼດໄດ້ຖືກຕິດຕັ້ງຢູ່ປາຍລຸ່ມຂອງ beam ສໍາລັບການວັດແທກການໂຫຼດການທົດສອບ.
1.5. ຕົວຍຶດ, ການເຄື່ອນໄຫວ beam ແລະປຸ່ມປະຕິບັດການຢຸດສຸກເສີນໄດ້ຖືກອອກແບບຢູ່ທາງຫນ້າຂອງເຄື່ອງເຮັດວຽກຕົ້ນຕໍເພື່ອອໍານວຍຄວາມສະດວກໃນການເຮັດວຽກທີ່ງ່າຍດາຍຂອງຜູ້ທົດສອບ.
2. ຕົວກະຕຸ້ນ:
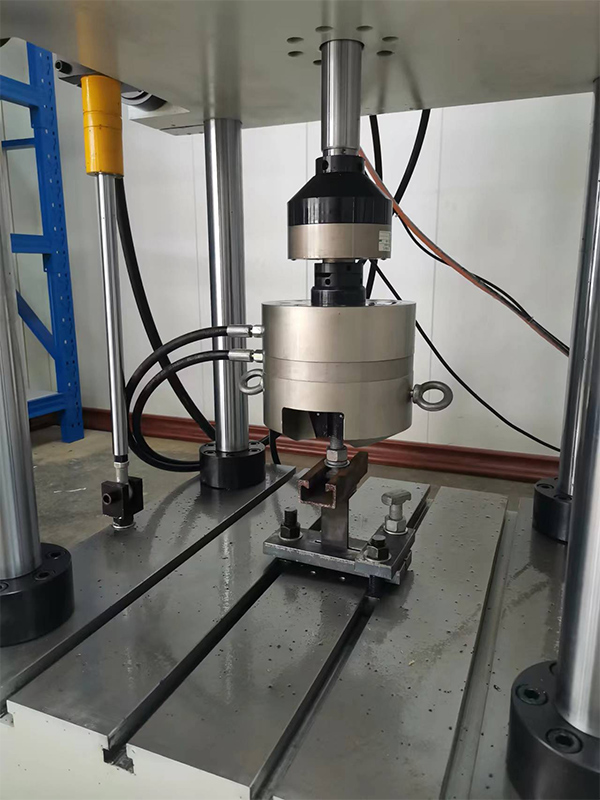
ເຄື່ອງກະຕຸ້ນເສັ້ນຊື່ servo ແມ່ນອົງປະກອບຫຼັກຂອງເຄື່ອງທົດສອບ, ແລະເຄື່ອງທົດສອບຈະສົ່ງຜົນແຮງທົດສອບຜ່ານຕົວກະຕຸ້ນ. ຕົວກະຕຸ້ນແມ່ນຖືກສ້າງຂຶ້ນໃນສ່ວນຕ່ໍາຂອງເຄື່ອງຈັກຕົ້ນຕໍແລະປະກອບດ້ວຍຕົວກະຕຸ້ນ, ໂມດູນຄວບຄຸມໄຮໂດຼລິກແລະເຊັນເຊີ.

2.1. ຕົວກະຕຸ້ນໃຊ້ servo linear actuator ແລະຮັບຮອງເອົາຄູ່ຄວບຄຸມປ່ຽງ servo ສີ່ທາງສົມມາດທີ່ເອີ້ນວ່າຫຼັກການ actuator. ຕົວກະຕຸ້ນໄດ້ຖືກອອກແບບແລະຜະລິດດ້ວຍແນວຄວາມຄິດຂອງຫນ່ວຍງານ, modularization ແລະມາດຕະຖານ, ແລະຮັບຮອງເອົາຫຼາຍຂັ້ນຕອນຂອງການສະຫນັບສະຫນູນກົນໄກການລວມຕົວແບບຍືດຫຍຸ່ນ, ເຊິ່ງມີລັກສະນະຂອງການປຽກຕ່ໍາ, ການຕອບສະຫນອງສູງ, ຊີວິດສູງແລະການອອກແບບຊ່ອງຫວ່າງຂະຫນາດໃຫຍ່. ຄວາມກົດດັນເລີ່ມຕົ້ນສູນ, ບໍ່ມີການລວບລວມຂໍ້ມູນ.
2.2, ປະທັບຕາ piston actuator adopts ຮູບແບບການປະທັບຕາຊ່ອງຫວ່າງ, adopts ສະຫນັບສະຫນູນວົງການຜະນຶກທີ່ນໍາເຂົ້າ, ການອອກແບບຊ່ອງຫວ່າງຂະຫນາດໃຫຍ່, ຄວາມຕ້ານທານສູງກັບຜົນບັງຄັບໃຊ້ຂ້າງຄຽງ, ແລະມີຄຸນສົມບັດຂອງການຫລໍ່ລື່ນຕົນເອງທີ່ບໍ່ແມ່ນ sintering ຄວາມໄວສູງ. ປະທັບຕາປະສົມປະສານ, ປະທັບຕາຄວາມກົດດັນສູງ, ປະທັບຕາຄວາມກົດດັນຕ່ໍາແລະຊ່ອງຫວ່າງທໍ່ຮົ່ວ, ປະກອບ actuator ເພື່ອເຮັດໃຫ້ບໍ່ມີນ້ໍາຮົ່ວໄຫຼ. ວິທີການປະທັບຕາຂ້າງເທິງນີ້ປະສິດທິພາບສາມາດຫຼຸດຜ່ອນຄວາມຕ້ານທານ friction ພາຍໃນຂອງ actuator, ປັບປຸງຄວາມຖືກຕ້ອງຂອງການທົດສອບຂອງເຄື່ອງທົດສອບແລະຊີວິດການບໍລິການຂອງ actuator ໄດ້. Servo linear actuator ຕອບສະຫນອງຄວາມຖີ່ຂອງການບໍ່ຫນ້ອຍກ່ວາ 100Hz.
2.3, servo linear actuator amplitude limit position design buffer ໄຮໂດຼລິກເພື່ອຫຼີກເວັ້ນການແລ່ນອອກຈາກຄວາມເສຍຫາຍຂອງການຄວບຄຸມ.
2.4, ການເຄື່ອນທີ່ຂອງເຊັນເຊີ servo linear actuator displacement ແມ່ນມີຄວາມຍືດຫຍຸ່ນໂດຍບໍ່ມີການລົບກວນຈາກພາຍນອກ, rod piston ຮັບຮອງເອົາການສໍາເລັດຮູບ super, ການເຄືອບດ້ານແລະການຂັດເຖິງ Rα0.4u.
2.5. ຕົວກະຕຸ້ນແມ່ນຕິດຕັ້ງດ້ວຍໂມດູນໄຮໂດຼລິກທີ່ປະກອບດ້ວຍການກັ່ນຕອງນ້ໍາມັນທີ່ມີຄວາມແມ່ນຍໍາທີ່ມີຄວາມຖືກຕ້ອງຂອງການຕອງຂອງ 0.003mm, ວົງຈອນນ້ໍາມັນ inlet ແລະກັບຄືນທີ່ມີການກໍາຈັດກໍາມະຈອນແລະການເກັບຮັກສາພະລັງງານ, ແລະປ່ຽງ servo electro-hydraulic ສອງຂັ້ນຕອນສໍາລັບການເຄື່ອນໄຫວ. ເຄື່ອງທົດສອບຂອງບໍລິສັດ MOOG ໃນສະຫະລັດ. ການກັ່ນຕອງນ້ໍາມັນທີ່ມີຄວາມແມ່ນຍໍາໄດ້ຖືກຕິດຕັ້ງຢູ່ທາງຫນ້າຂອງປ່ຽງ servo electro-hydraulic, ເຊິ່ງປະສິດທິຜົນສາມາດປ້ອງກັນປ່ຽງ electro-hydraulic servo ຈາກການອຸດຕັນເນື່ອງຈາກມົນລະພິດນ້ໍາມັນໄຮໂດຼລິກ.
2.6, ເຊັນເຊີໂຫຼດແລະສະກູ chuck ໄຮໂດຼລິກ, ທໍ່ລູກສູບແລະ chuck ໄຮໂດຼລິກອອກແບບອຸປະກອນການເກັບກູ້ພິເສດເພື່ອປັບປຸງປະສິດທິພາບການຕອບສະຫນອງແບບເຄື່ອນໄຫວຕື່ມອີກ.
3, ສະຖານີສູບ servo ແຮງດັນຄົງທີ່:
ສະຖານີສູບນ້ຳສ່ວນຫຼາຍແມ່ນປະກອບດ້ວຍແຜ່ນຮອງ, ຖັງນ້ຳມັນ, ໜ່ວຍປ້ຳນ້ຳມັນ, ປ່ຽງປ່ຽງ, ທໍ່ສົ່ງນ້ຳ, ລະບົບທຳຄວາມເຢັນ ແລະ ອື່ນໆ. ມັນຖືກນໍາໃຊ້ເພື່ອສະຫນອງພະລັງງານຂອງເຄື່ອງທົດສອບ.

3.1, ຖັງປໍ້າຂອງສະຖານີສູບໄດ້ຮັບຮອງເອົາການອອກແບບທີ່ປິດລ້ອມຢ່າງເຕັມທີ່, ເຊິ່ງສາມາດປ້ອງກັນສິ່ງເສດເຫຼືອຈາກພາຍນອກບໍ່ໃຫ້ເຂົ້າໄປໃນລະບົບໄຮໂດຼລິກເພື່ອສ້າງມົນລະພິດນໍ້າມັນໄຮໂດຼລິກ. ຖັງນ້ໍາມັນແມ່ນເຮັດດ້ວຍແຜ່ນສະແຕນເລດ, ເຊິ່ງປະສິດທິພາບສາມາດປ້ອງກັນການກັດກ່ອນຂອງໂລຫະຈາກການເປັນມົນລະພິດຂອງນ້ໍາມັນໄຮໂດຼລິກ.
3.2. ປັ໊ມນ້ໍາມັນແລະຫນ່ວຍບໍລິການໄຟຟ້າໄດ້ຖືກຕັ້ງຄ່າດ້ວຍການຮອງຮັບ elastic double ໃນຊຸດເພື່ອຫຼຸດຜ່ອນສຽງຂອງສະຖານີສູບນ້ໍາຕື່ມອີກ.
3.3, ປ້ຳນ້ຳມັນໃຊ້ປ້ຳເກຍທີ່ມີສຽງຕ່ຳເປັນເສັ້ນກົງ. ຄຸນນະສົມບັດ: ໃນອຸດສາຫະກໍາໄຮໂດຼລິກແມ່ນເປັນທີ່ຮູ້ຈັກເປັນ "ບໍ່ເຄີຍໃສ່ປັ໊ມນ້ໍາມັນ", ໃຊ້ສໍາລັບລະບົບໄຮໂດຼລິກສູງ, ປັບໄຫມ, ແຫຼມ. ບໍລິສັດທີ່ມີຊື່ສຽງຫຼາຍແຫ່ງໃນໂລກໄດ້ພັດທະນາແລະສົ່ງເສີມມັນເປັນຜະລິດຕະພັນຍີ່ຫໍ້ເພື່ອຮັບປະກັນຕໍາແຫນ່ງຊັ້ນນໍາໃນອຸດສາຫະກໍາໄຮໂດຼລິກ. ເມື່ອປຽບທຽບກັບປັ໊ມ vane ແລະປັ໊ມ plunger, ປັ໊ມເກຍພາຍໃນທີ່ມີເສັ້ນຊື່ມີປະສິດຕິພາບທີ່ດີເລີດເຊັ່ນ: ສຽງຕ່ໍາ, ບໍ່ມີ pulsation ແລະຊີວິດຍາວ. ສຽງດັງຕໍ່າ: ຄຸນສົມບັດທີ່ດີເລີດຂອງປ້ຳເກຍດ້ານໜ້າແບບເສັ້ນຊື່ທົ່ວໄປແມ່ນການອອກແບບເກຍພິເສດ, ຄັງຮູບແຂ້ວເກຍເປັນເສັ້ນຊື່, ຮູບຮ່າງຂອງແຂ້ວເກຍແມ່ນເສັ້ນກົງທົ່ວໄປ, ແລະເກືອບບໍ່ມີພື້ນທີ່ນໍ້າມັນຕິດຢູ່ໃນເວລາເຮັດວຽກ. , ເຖິງແມ່ນວ່າຢູ່ໃນຄວາມໄວສູງ, ສຽງຍັງກ້ຽງແລະສະຫງົບ. ຊີວິດຍາວ: ຄຸນລັກສະນະຂອງຊີວິດຍາວຂອງເຄື່ອງສູບເກຍຕາຫນ່າງພາຍໃນເສັ້ນແມ່ນຂຶ້ນກັບຄວາມຕ້ານທານການສວມໃສ່, ພື້ນຜິວກົນຈັກພາຍໃນແລະສ່ວນທີ່ເຮັດວຽກມີຊັ້ນປ້ອງກັນຫນັງນ້ໍາມັນ, ເກືອບບໍ່ມີການສວມໃສ່, ເຖິງແມ່ນວ່າການນໍາໃຊ້ນ້ໍາມັນໄຮໂດຼລິກທົ່ວໄປ, ມັນບໍ່ງ່າຍທີ່ຈະໃສ່ພາກສ່ວນ. ນອກຈາກນັ້ນ, ຫຼັກການຂອງຄວາມແຕກຕ່າງກັນຄວາມກົດດັນທີ່ຮັບຜິດຊອບສອງຂັ້ນຕອນເພີ່ມຄວາມກົດດັນໃນການເຮັດວຽກ, ແຕ່ຍັງປັບປຸງສະພາບການເຮັດວຽກຂອງປັ໊ມແລະຍືດອາຍຸການບໍລິການຂອງປັ໊ມ;
3.4, ໂດຍປ່ຽງການບັນເທົາຕົ້ນຕໍ, ເຄື່ອງສະສົມ, ປ່ຽງການບັນເທົາທຸກຕົ້ນຕໍຊ່ວຍ, ປ່ຽງການຊ່ວຍເຫຼືອແລະວາວປີ້ນກັບກັນ, ການກັ່ນຕອງນ້ໍາມັນທີ່ມີຄວາມແມ່ນຍໍາປະກອບດ້ວຍໂມດູນໄຮໂດຼລິກສະຫຼັບອ່ອນຂອງຄວາມກົດດັນສູງແລະຕ່ໍາທີ່ໃຊ້ໃນການຄວບຄຸມຄວາມກົດດັນຜົນຜະລິດຂອງປັ໊ມ ສະຖານີ;
3.5, ສະຖານີປັ໊ມມີການເລີ່ມຕົ້ນຄວາມກົດດັນຕ່ໍາ, ໂຫມດສະຫຼັບຄວາມກົດດັນສູງ, ສາມາດຫຼຸດຜ່ອນຜົນກະທົບຂອງລະບົບໄຮໂດຼລິກຢ່າງມີປະສິດທິພາບ;
3.6, ສະຖານີປັ໊ມມີເຄື່ອງເຮັດຄວາມເຢັນໃນສາຍ (ຜູ້ໃຊ້ນ້ໍາເຢັນ) ສໍາລັບການເຮັດຄວາມເຢັນຂອງລະບົບໄຮໂດຼລິກ;
3.7, ສະຖານີປັ໊ມຕິດຕັ້ງດ້ວຍເຄື່ອງວັດແທກອຸນຫະພູມຕິດຕໍ່ໄຟຟ້າສອງເທົ່າ, ເຄື່ອງວັດແທກລະດັບຂອງແຫຼວ; ຄຸນສົມບັດອຸນຫະພູມນ້ຳມັນ (ຕ່ຳກວ່າ 10ºC, ສູງກວ່າ 55ºC), ລະດັບຂອງແຫຼວ, ສັນຍານເຕືອນການອຸດຕັນຂອງກອງນ້ຳມັນ ແລະການປ້ອງກັນບ່ອນຈອດລົດ
3.8, ສະຖານີສູບນ້ໍາໄດ້ຖືກຕິດຕັ້ງດ້ວຍອຸປະກອນທໍ່ໄຮໂດຼລິກແລະທໍ່ຄວາມກົດດັນສູງເພື່ອຮັບປະກັນວ່າລະບົບບໍ່ມີການຮົ່ວໄຫຼ;
ໄຟລ໌ແນບ: ຮູບພາບຂອງສະຖານີປ້ຳ servo ແຮງດັນຄົງທີ່

4, ຕົວຄວບຄຸມ servo ຊ່ອງດຽວດິຈິຕອນເຕັມຮູບແບບ:
5.1 ລະບົບການຄວບຄຸມໃຊ້ຕົວຄວບຄຸມ servo ໄຮໂດຼລິກດິຈິຕອນເຕັມຂອງບໍລິສັດຂອງພວກເຮົາ. ການຕັ້ງຄ່າຫຼັກ:
ໂມດູນຄວບຄຸມຫຼັກທີ່ອີງໃສ່ Dsp ທີ່ຮອງຮັບຫຼາຍຊ່ອງທາງປິດ;
ໜ່ວຍປັບສັນຍານທີ່ມີສາມເຊັນເຊີ (ແຮງ, ການຍ້າຍ, ການປ່ຽນຮູບ)
ໜ່ວຍຂັບເຊີໂວວາວສຳຮອງ
ການທົດສອບລະບົບຊອບແວການຄວບຄຸມ ຊອບແວທົດສອບ intuitive, readable;


4.2 SuptestV4.2 ຂໍ້ມູນຈໍາເພາະດ້ານວິຊາການຫຼັກ
ໂມດູນຄວບຄຸມ: ສາມາດບັນລຸຟັງຊັນການຄວບຄຸມວົງປິດ, ສາມາດເກັບກຳສັນຍານເພື່ອຄວບຄຸມວົງປິດແບບດິຈິຕອລເຕັມຮູບແບບ, ຄວາມຖີ່ການຄວບຄຸມວົງປິດ 10kHz;
Servo valve drive unit: ການຄວບຄຸມການຂັບ nozzle servo valve;
Waveform generator ໄລຍະຄວາມຖີ່: 0.001-50Hz, ຄວາມລະອຽດຄວາມຖີ່: 0.001Hz;
ຮູບແບບຄື້ນຄວບຄຸມ: ຄື້ນຊີນ, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມ, ຄື້ນແຂ້ວເລື່ອຍ, ຄື້ນເຄິ່ງຊີນ, ຄື້ນສາມຫຼ່ຽມເຄິ່ງ, ຄື້ນສຸ່ມ ແລະຮູບແບບຄື້ນຂາເຂົ້າພາຍນອກ;
ໂໝດການຄວບຄຸມ: ການຄວບຄຸມວົງປິດຂອງແຮງ, ການຍ້າຍ ແລະ ການປ່ຽນຮູບ, ເຊິ່ງສາມາດຮັບຮູ້ການສະຫຼັບຂອງໂໝດການຄວບຄຸມໃດໆກໍຕາມ;
ລະບົບມີການປັບຕົວເຊັນເຊີ ແລະຟັງຊັນການລ້າງສູນ;
ຟັງຊັນການຕິດຕາມສະຖານີໄຮໂດຼລິກທີ່ສົມບູນແບບ, ສາມາດຕິດຕາມອຸນຫະພູມນ້ຳມັນ, ຄວາມດັນ, ແລະອື່ນໆ.
4.3 ຄອມພິວເຕີ ແລະເຄື່ອງພິມ
ຄອມພິວເຕີຍີ່ຫໍ້, ການຕັ້ງຄ່າກະແສຫຼັກ
ເຄື່ອງພິມ HP
ສາມ, ຕົວຊີ້ບອກປະສິດທິພາບດ້ານວິຊາການຕົ້ນຕໍ:
1, ແຮງທົດສອບສະຖິດສູງສຸດ: ±50kN
ແຮງທົດສອບໄດນາມິກສູງສຸດ; ±40kN
2, ລະດັບການວັດແທກຜົນບັງຄັບໃຊ້ການທົດສອບ: 1 ~ 100% (ຂະບວນການທັງຫມົດບໍ່ໄດ້ຖືກຈັດອັນດັບ); ຄວາມຖືກຕ້ອງຂອງການວັດແທກ: ±1% F.S
3. ພື້ນທີ່ທົດສອບ:
3.1 ພື້ນທີ່ສຸດທິທົດສອບທີ່ສາມາດປັບໄດ້ສູງສຸດ: 800mm
3.2 ໄລຍະຫ່າງຖັນທີ່ມີປະສິດທິພາບ: 600mm
4, ໄລຍະການເດີນທາງຕົວກະຕຸ້ນ: 0-150mm
5. ຄວາມຖືກຕ້ອງຂອງເຄື່ອງທົດສອບ:
5.1 ຄວາມຖືກຕ້ອງຂອງການວັດແທກຜົນບັງຄັບໃຊ້ແລະການປ່ຽນຮູບແບບ: ±0.5% (ສະຖິຕິ) ດີກວ່າຄ່າທີ່ລະບຸໄວ້ (ສະຖິດ) ກ່ວາ ±1.0% (ແບບເຄື່ອນໄຫວ)
5.2 ຄວາມຖືກຕ້ອງຂອງການວັດແທກການເຄື່ອນຍ້າຍ: ດີກວ່າຄ່າທີ່ລະບຸໄວ້ ±0.5% (ສະຖິດ) ດີກວ່າຄ່າທີ່ລະບຸ ±0.5% (ສະຖິດ)
5.3 ການເໜັງຕີງຂອງການໂຫຼດສະເລ່ຍຂອງແຮງທົດສອບ: ±1%;
5.4 ການເໜັງຕີງຂອງການໂຫຼດແບບໄດນາມິກຂອງແຮງທົດສອບ: ±1%;
6, ຮູບແບບຄື້ນທົດສອບ: ຄື້ນສີ່ຫລ່ຽມ, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມ, ຄື້ນຊີນ, ຄື້ນແຂ້ວເລື່ອຍ ແລະຮູບແບບຄື້ນທີ່ຜູ້ໃຊ້ກຳນົດເອງ.
7, ຄວາມຖີ່ຂອງການທົດສອບ: 0.01 ~ 25Hz (ຄວາມກວ້າງຂອງ 3Hz ແມ່ນ (0.7 ~ 1.3) ເທົ່າຂອງໂຫຼດເຮັດວຽກ)
8, ເວລາເມື່ອຍ: 1×107 ເທື່ອ (ເລືອກໄດ້)
9, ຮູບແບບການຄວບຄຸມ: ຜົນບັງຄັບໃຊ້, ການເຄື່ອນຍ້າຍ, ການບິດເບືອນການຄວບຄຸມວົງປິດ PID, ແລະສາມາດບັນລຸຮູບແບບການຄວບຄຸມໃດໆທີ່ລຽບການສະຫຼັບທີ່ບໍ່ລົບກວນ.
10, ການຕັ້ງຄ່າສະຖານີປ້ຳໄຮໂດຼລິກ: ການໄຫຼ 36L/ນາທີ, ແຮງດັນ 21Mpa.
11, ຕັ້ງຄ່າຊຸດຂອງຄອມພິວເຕີປະຕິບັດການ ແລະອຸປະກອນການພິມອອກ.
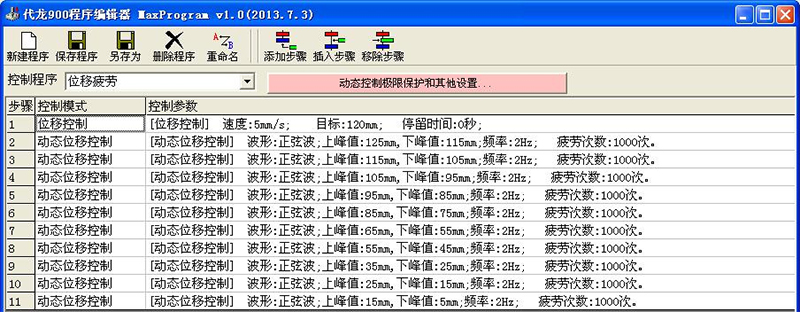
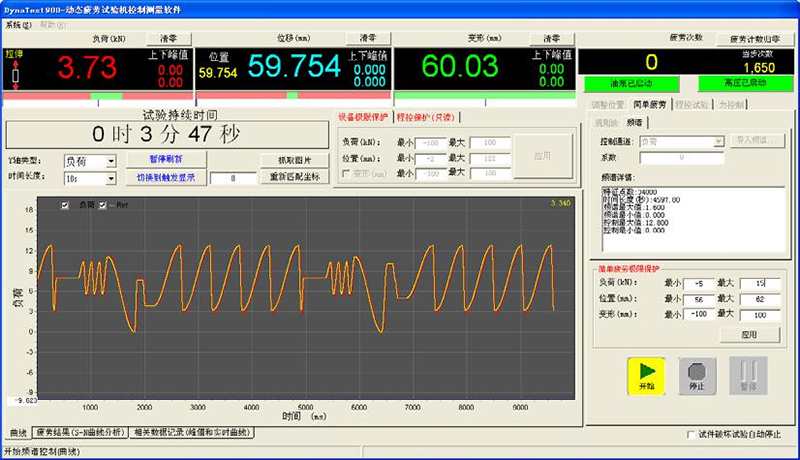
12, ຊອບແວທົດສອບ: ເໝາະສຳລັບການເຮັດວຽກຂອງແພລດຟອມທົດສອບ Windows. ປະສົມປະສານກັບລະບົບການຄວບຄຸມ, ລະບົບການທົດສອບສາມາດຄວບຄຸມເພື່ອເຮັດສໍາເລັດການທົດສອບຄຸນສົມບັດກົນຈັກແບບເຄື່ອນໄຫວແລະສະຖິດຕ່າງໆ, ແລະເຄື່ອງມືການທົດສອບທີ່ແຕກຕ່າງກັນສາມາດຕິດຕັ້ງໄດ້ເພື່ອບັນລຸຄວາມຕ້ອງການການທົດສອບຂອງສະມໍ, T-bolts ແລະຄອນກີດໃນຊ່ອງຝັງ. ຊອບແວບໍ່ພຽງແຕ່ຄວບຄຸມການເຮັດວຽກຂອງລະບົບການທົດສອບ, ແຕ່ຍັງມີຫນ້າທີ່ແຕ້ມຮູບໂຄ້ງການທົດສອບທຸກປະເພດທີ່ຕອບສະຫນອງຄວາມຕ້ອງການຂອງການທົດສອບ static, ການຄຸ້ມຄອງການທົດສອບ, ການເກັບຮັກສາຂໍ້ມູນແລະການພິມບົດລາຍງານການທົດສອບ.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese