 {02909}
{02909}
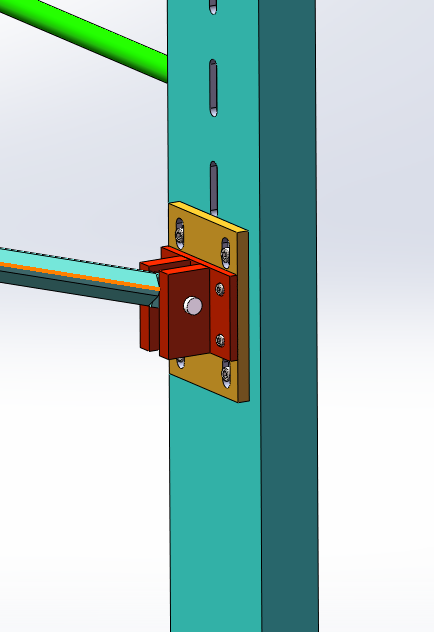
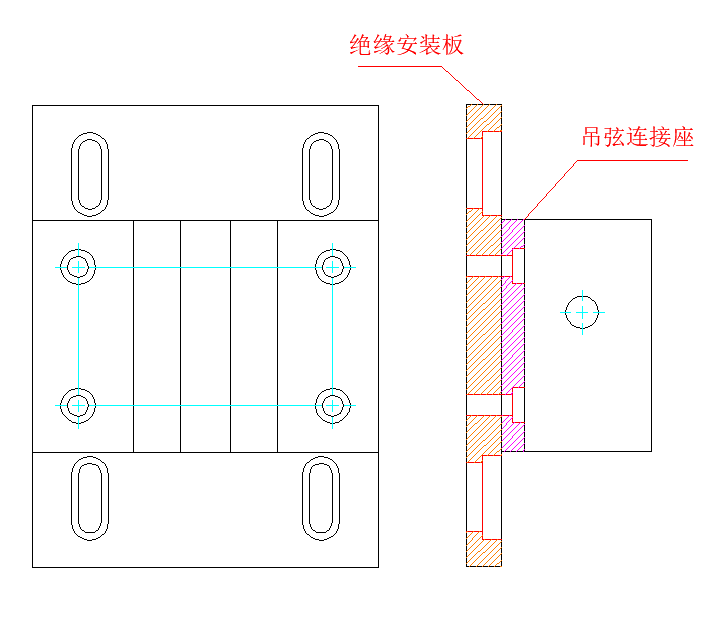
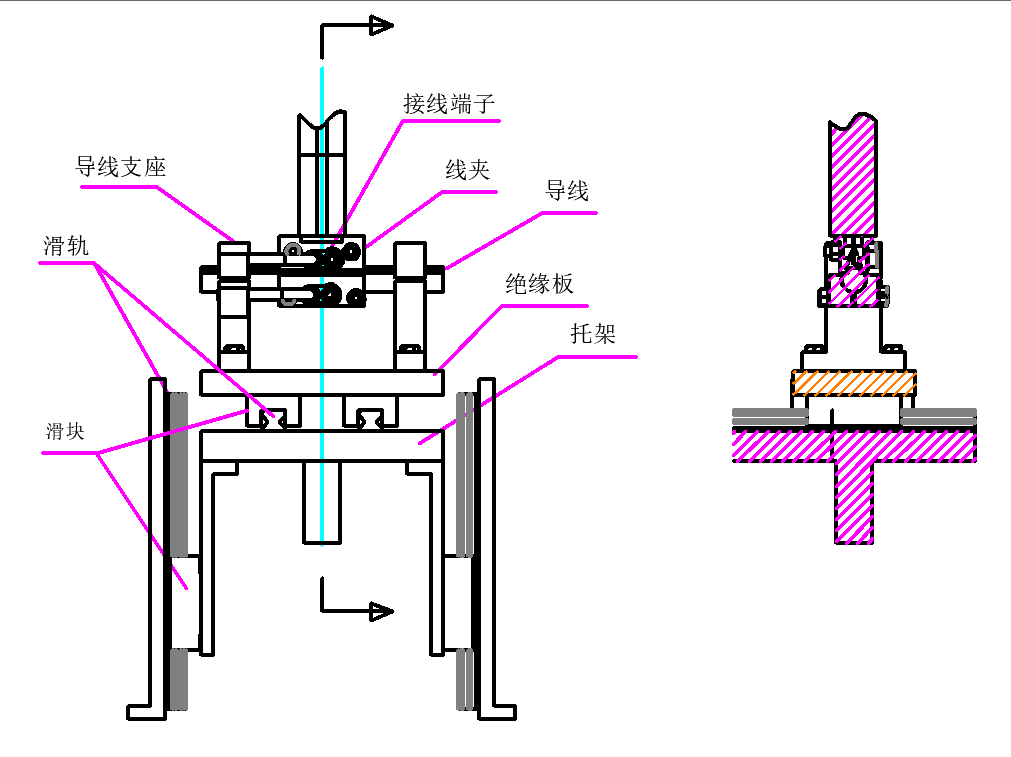
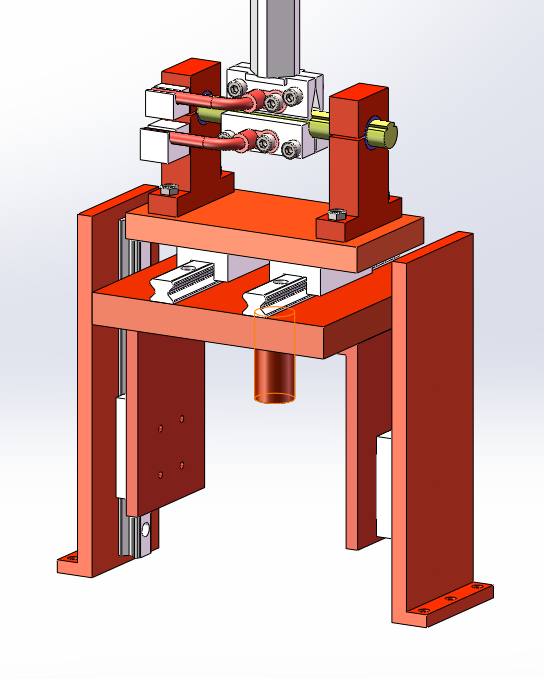
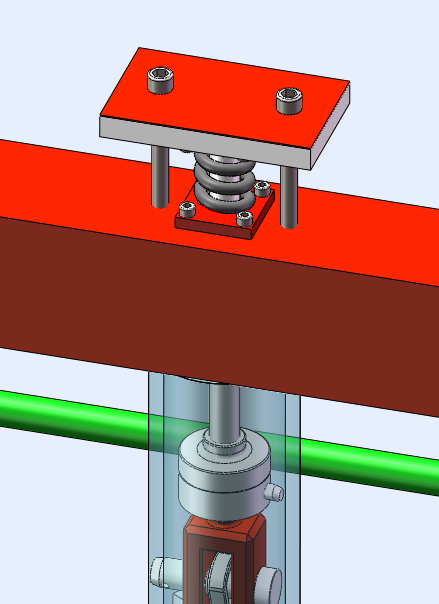
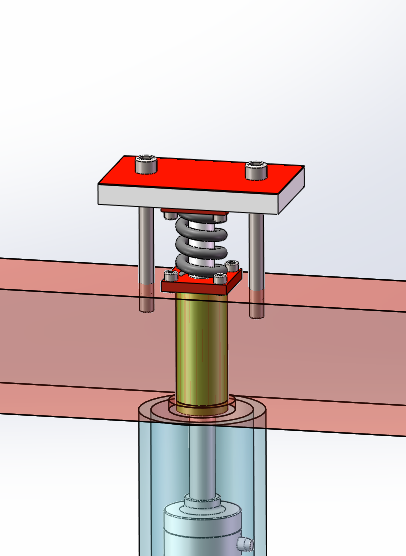
11) ຕົວຍຶດສາຍຖືກລັອກດ້ວຍສະລັອດ, ການເຊື່ອມຕໍ່ຕົວຍຶດແມ່ນ insulated, ແລະສາຍເຊືອກຜູກກັບຕໍາແຫນ່ງຄົງທີ່ຂອງຕົວຍຶດສາຍ.
2. ຕົວກະຕຸ້ນ:
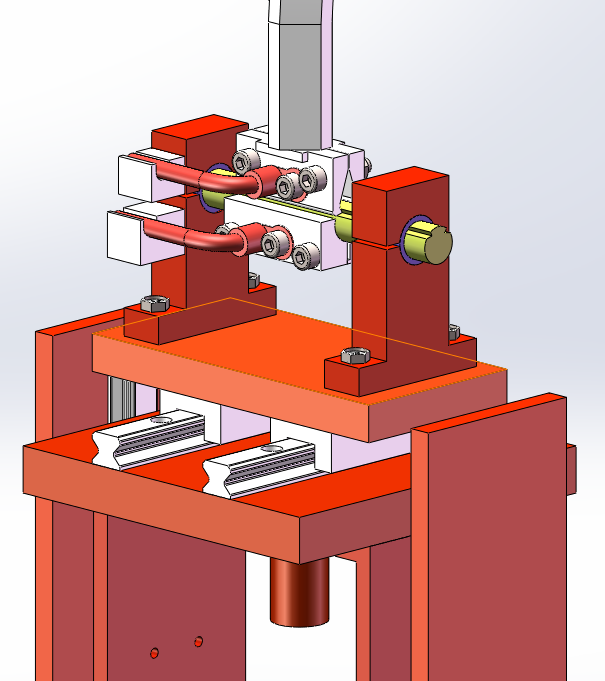
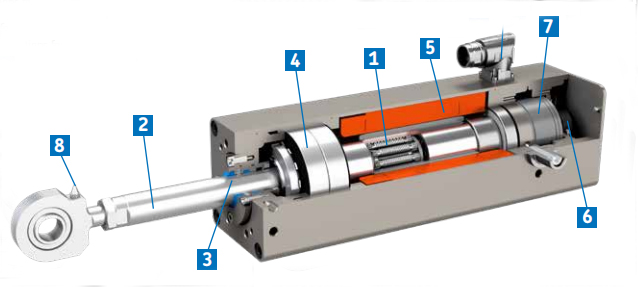
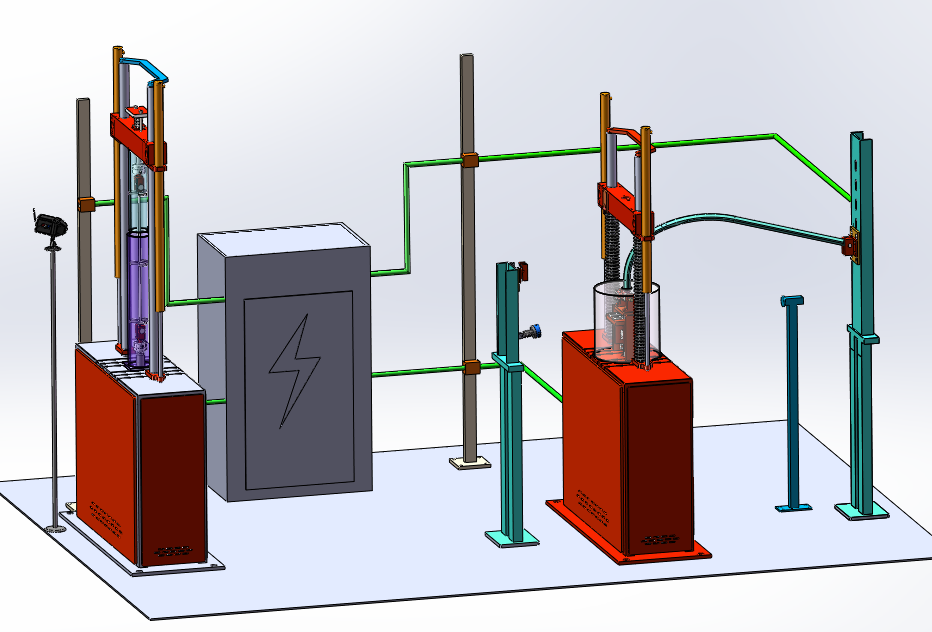
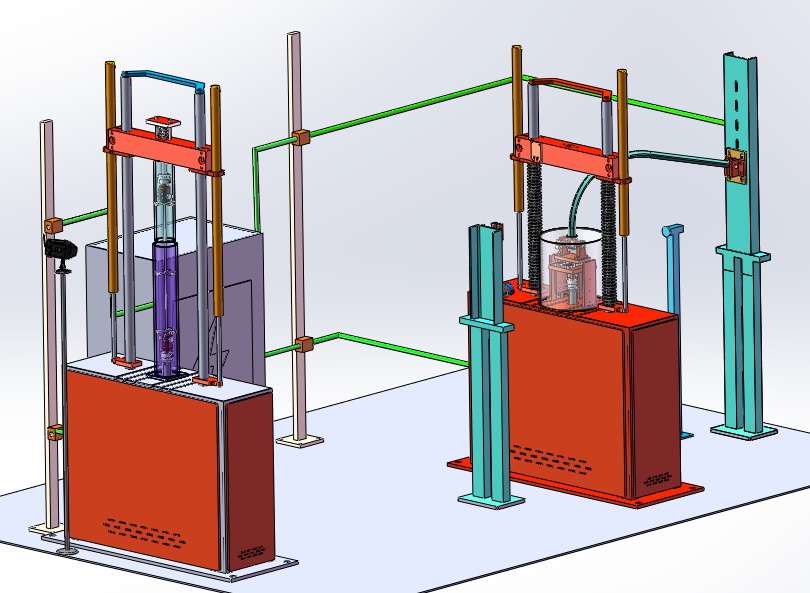
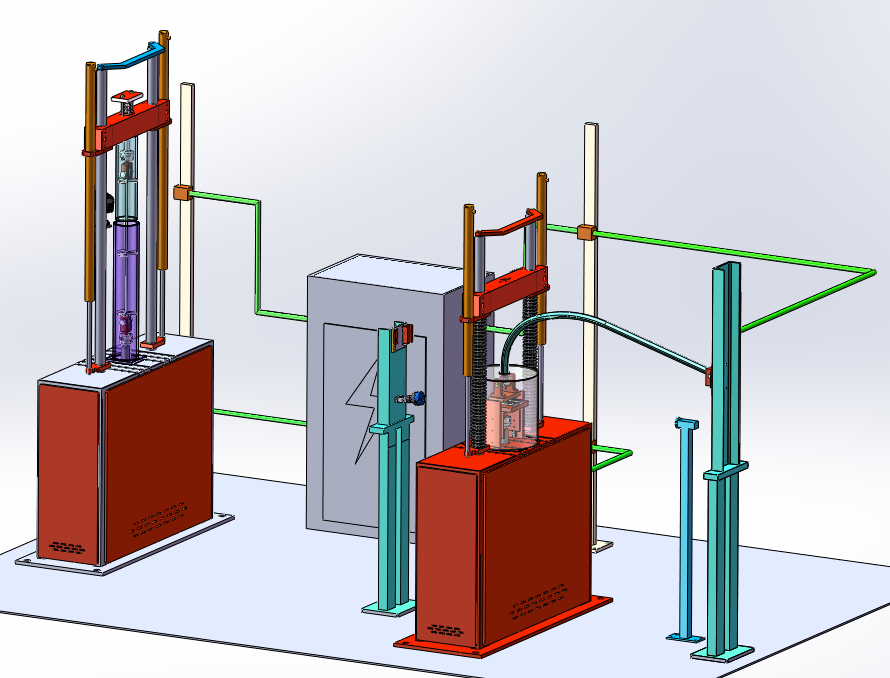
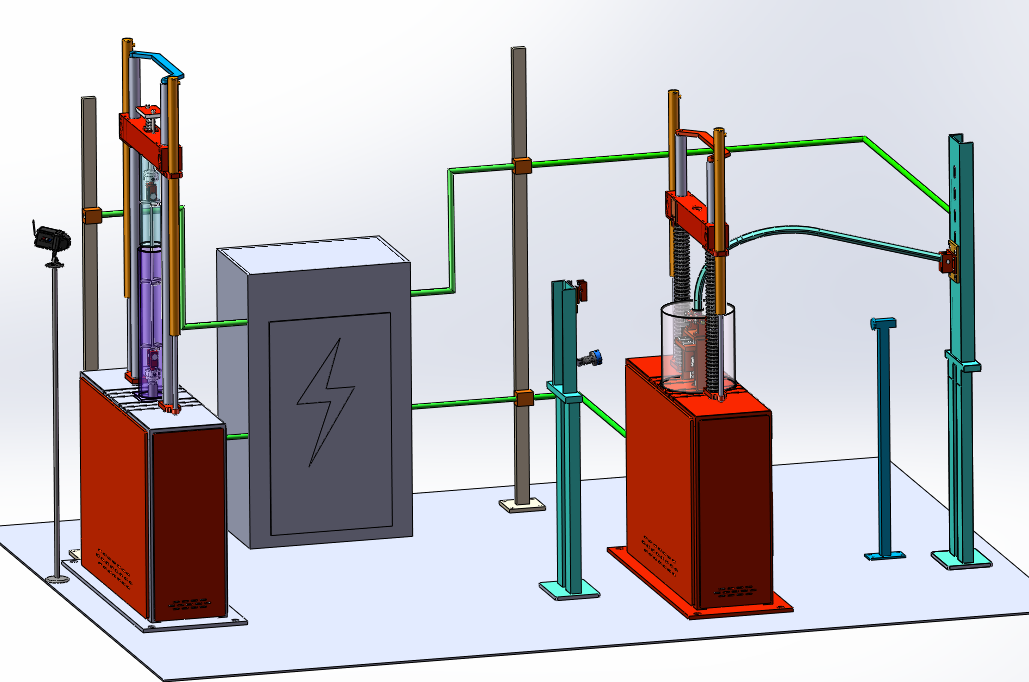
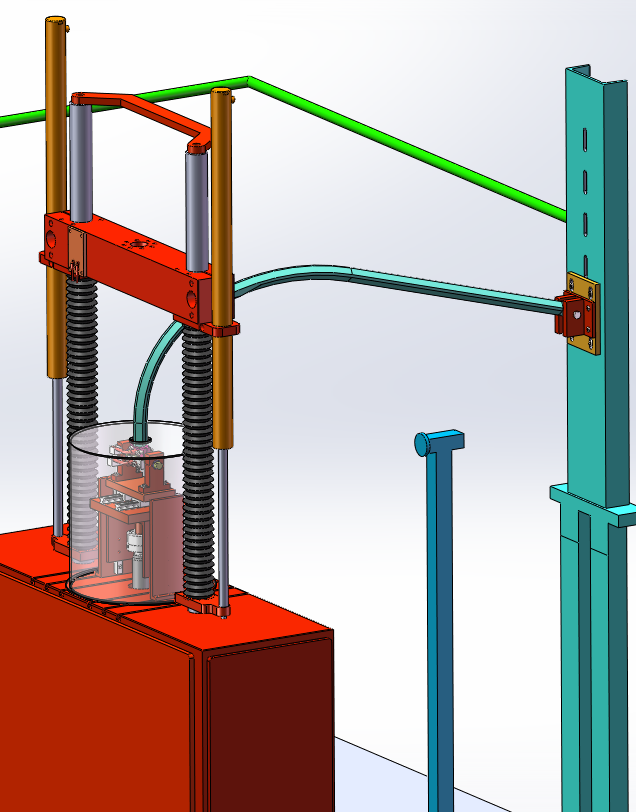
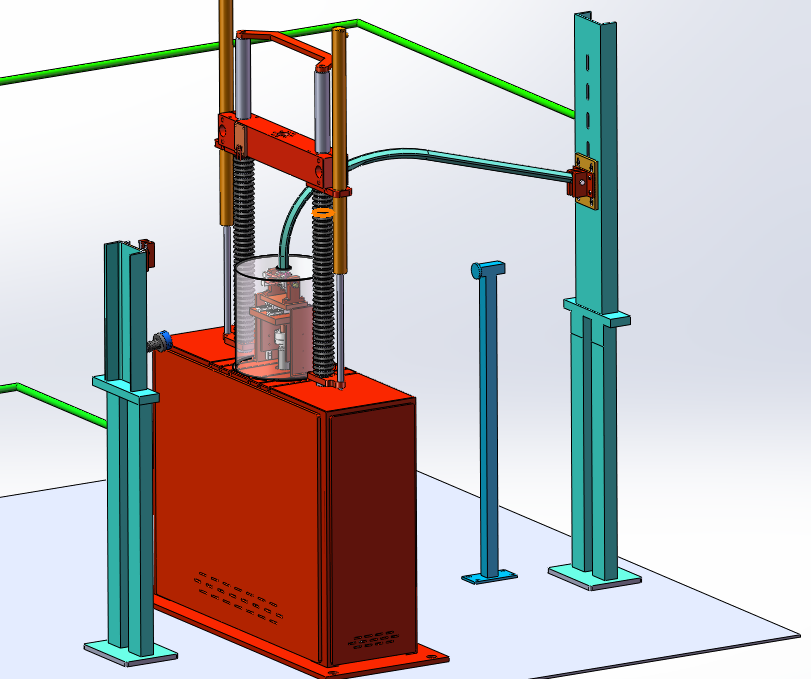
2.1 ເຄື່ອງກະຕຸ້ນເສັ້ນແມ່ເຫຼັກໄຟຟ້າເປັນອົງປະກອບຫຼັກຂອງເຄື່ອງທົດສອບ ແລະສົ່ງພະລັງງານອອກຜ່ານຕົວກະຕຸ້ນ. ອອກແບບແລະຜະລິດດ້ວຍເຕັກໂນໂລຊີຂອງຕົນເອງ, ມັນແມ່ນປະກອບດ້ວຍຮ່າງກາຍ actuator, ໂມດູນຄວບຄຸມໄຟຟ້າແລະເຊັນເຊີ.
ພາຣາມິເຕີພື້ນຖານ
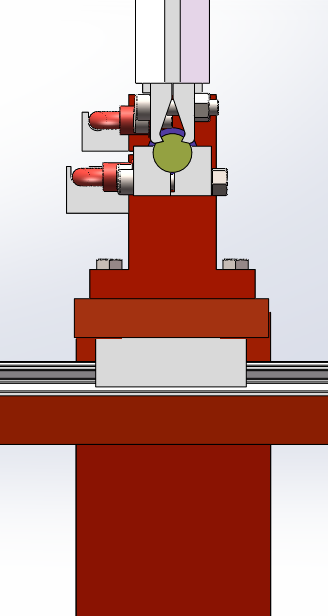
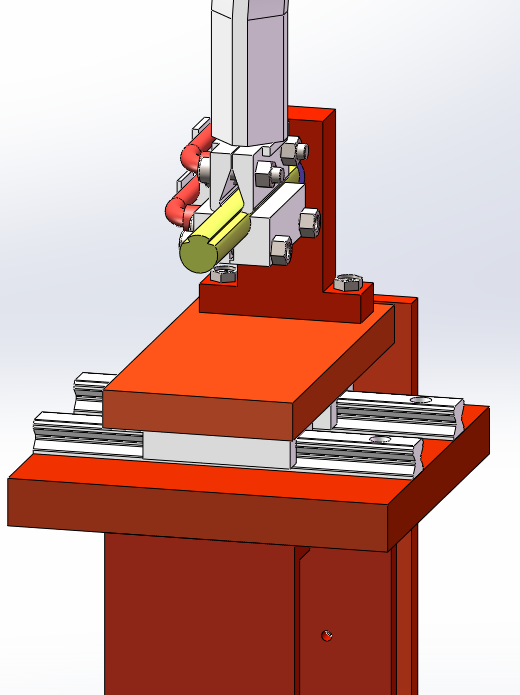
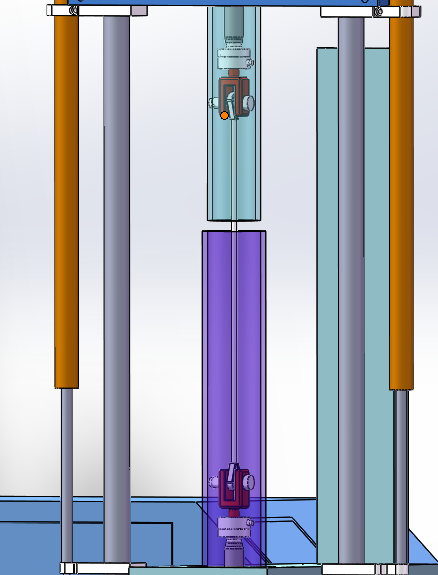
ກະບອກສູບກະຕຸ້ນແມ່ນວາງໄວ້ໃຕ້ໂຕະ.
ແຮງໄດນາມິກສູງສຸດ: ±1150N.
ແຮງສະຖິດສູງສຸດ: ±1150N
Actuator effective stroke: +/-100mm(total stroke 220mm);
ຈັງຫວະການບີບອັດສູງສຸດ 110mm ທີ່ 2hz
ເມື່ອຈັງຫວະການບີບອັດສູງສຸດແມ່ນ 20mm, ຄວາມຖີ່ສູງສຸດແມ່ນ 11hz,
ໄລຍະເວລາຂອງການທົດລອງແມ່ນບໍ່ຫນ້ອຍກວ່າ 500w ເທື່ອ.
ຕົວກະຕຸ້ນມາພ້ອມກັບເຊັນເຊີການຍ້າຍເລເຊີຄວາມແມ່ນຍໍາສູງ SONY,
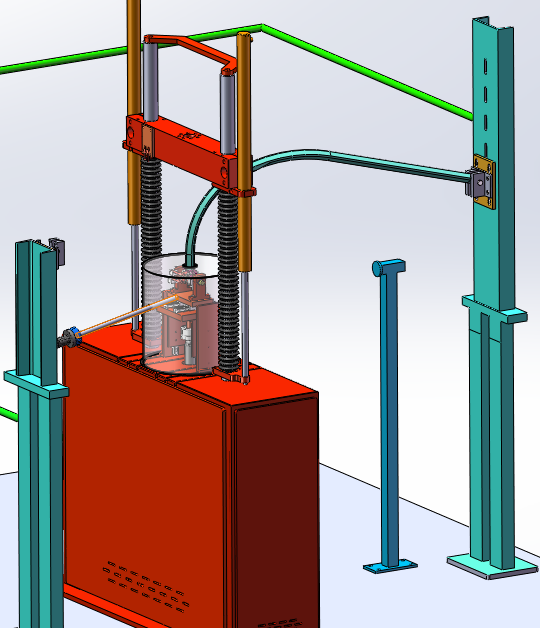
ຕຳແໜ່ງຂີດຈຳກັດຄວາມກວ້າງຂອງຕົວກະຕຸ້ນໄດ້ຖືກອອກແບບເປັນບັຟເຟີເພື່ອຫຼີກເວັ້ນການແລ່ນອອກຈາກການຄວບຄຸມ ແລະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍ;
ລະບົບຮັບຮອງເອົາອຸປະກອນຕ້ານການ backlash, ມູນຄ່າຜົນບັງຄັບໃຊ້ແມ່ນອັດຕະໂນມັດເປັນສູນກາງ, ຜົນບັງຄັບໃຊ້ຂ້າງຄຽງຈະຫຼຸດລົງ, ຜົນກະທົບຂອງການທົດສອບຄວາມກົດດັນຄວາມຖີ່ສູງແມ່ນຫຼຸດລົງ, ແລະຮູບແບບຄື້ນການທົດສອບໄດ້ຖືກປັບປຸງ.
2.2 ອຸປະກອນກໍາຈັດການເກັບກູ້ພິເສດຖືກອອກແບບມາຢູ່ທີ່ສະກູຮ່ວມລະຫວ່າງເຊັນເຊີການໂຫຼດແລະ chuck ແລະ piston rod ແລະ chuck ເພື່ອປັບປຸງປະສິດທິພາບການຕອບສະຫນອງແບບເຄື່ອນໄຫວຕື່ມອີກ.

3. ອຸປະກອນເສີມທົດສອບ
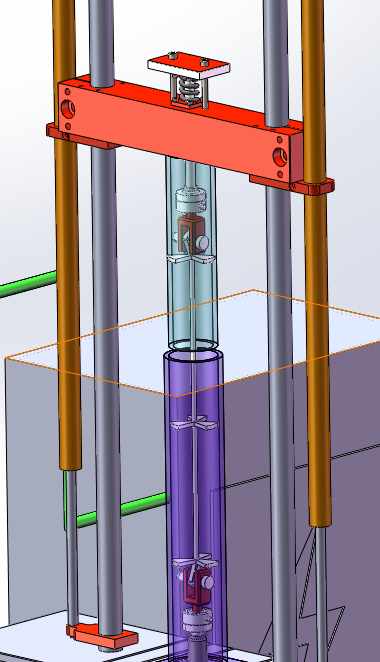
ອຸປະກອນເສີມເຊລາມິກພິເສດແມ່ນໃຊ້ສໍາລັບການທົດສອບຄວາມເມື່ອຍລ້າຂອງສາຍຫ້ອຍ.
ພາກສ່ວນທີ່ສໍາຄັນເຊັ່ນແຜ່ນຄວາມກົດດັນໄດ້ຖືກປະຕິບັດດ້ວຍເທກໂນໂລຍີພິເສດ, ເຊິ່ງມີລັກສະນະຂອງຄວາມແຂງສູງແລະທົນທານຕໍ່ການສວມໃສ່ທີ່ດີ (ບໍ່ມີ insulation).
ອຸປະກອນປ້ອງກັນການຈັດຕໍາແຫນ່ງຮັບປະກັນຄວາມປອດໄພຂອງສາຍແຂວນໃນລະຫວ່າງການທົດສອບຄວາມເມື່ອຍລ້າ, ຮັບປະກັນວ່າສາຍແຂວນແຕກໃນລະຫວ່າງການທົດສອບ, ແລະປາຍຫັກບໍ່ໂດດ, ປ້ອງກັນບໍ່ໃຫ້ປາຍຫັກຈາກການຕິດຕໍ່ກັບຕໍາແຫນ່ງໃດໆຂອງທໍ່. ອຸປະກອນ, ແລະປ້ອງກັນການຊ໊ອກໄຟຟ້າ.

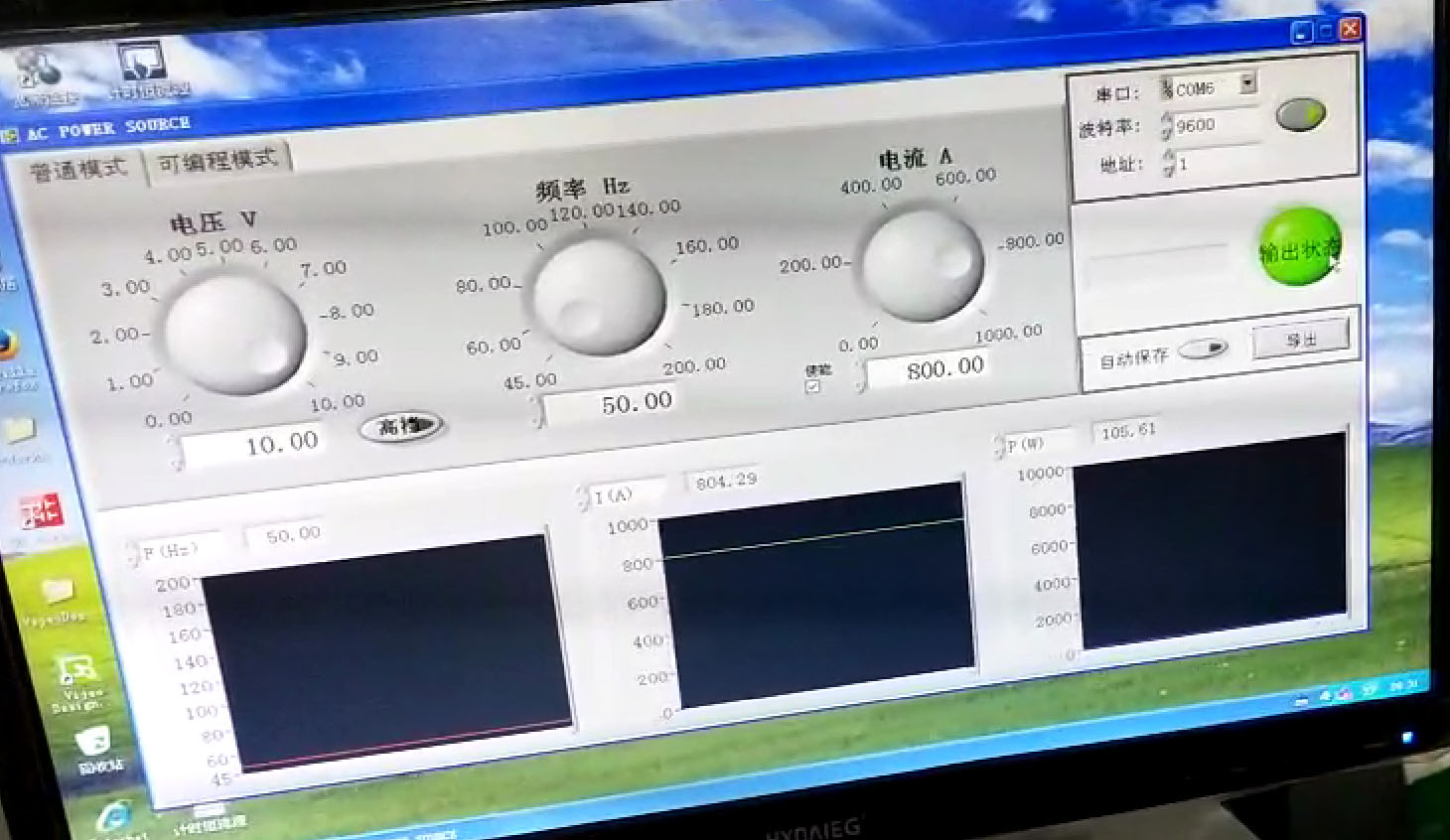
4. ອຸປະກອນສ້າງປັດຈຸບັນ
1) ການສະຫນອງພະລັງງານ: AC 220V/AC 380V 50Hz;
2) Output current 0~1050A AC (standard sine wave) /DC, ກະແສໄຟຟ້າຕໍ່າສຸດເຖິງ 300A, ຄວາມຜິດພາດຄວາມຖືກຕ້ອງຂອງປະຈຸບັນ ≤±0.5%;
3) ແຮງດັນຂາອອກ 0-10VDC, ຄວາມຜິດພາດຄວາມຖືກຕ້ອງ ≤±0.5%;
4) ຮູບແບບຄື້ນປະຈຸບັນຜົນຜະລິດແມ່ນປັບໄດ້, ຄວາມຖີ່ຂອງການໂຫຼດແມ່ນປັບໄດ້, ແລະຄ່າ RMS ແທ້ຈິງຂອງປະຈຸບັນແມ່ນປັບໄດ້ຢ່າງຕໍ່ເນື່ອງ;
5) ອຸປະກອນຄວນຮັບປະກັນວ່າມັນສາມາດສືບຕໍ່ເຮັດວຽກໃນຂະບວນການທົດສອບ, ດ້ວຍການຄວບຄຸມເອກະລາດຂອງການເປີດ, ເວລາປິດເຄື່ອງ, ການຄວບຄຸມເວລາຕ່ໍາສຸດ 1ms;
6) ດ້ວຍການສະແດງຮູບຄື້ນແບບສົດໆ, ການຕັ້ງຄ່າເວລາປິດ, ການຕັ້ງຄ່າເວລາປິດເຄື່ອງ, ແລະສາມາດປິດເຄື່ອງແບບເອກະລາດໄດ້ໃນຕອນທ້າຍຂອງການທົດສອບ (ຕົວຢ່າງການແຕກຫັກ) ຫຼືມີມາດຕະການປ້ອງກັນ insulation ອື່ນໆ;
7) ການອອກແບບການບິດເບືອນຮູບຊົງຄື້ນໃນປະຈຸບັນຄວນຕອບສະໜອງໄດ້ມາດຕະຖານແຫ່ງຊາດທີ່ສອດຄ້ອງກັນ ແລະມາດຕະຖານອຸດສາຫະກໍາ;
8) ຄວາມຖີ່ AC ຜົນຜະລິດຄວນຈະສອດຄ່ອງກັບພາກສະຫນາມຕົວຈິງ, 50Hz;
9) ອຸປະກອນຄວນຈະມີຫນ້າທີ່ຂອງ overcurrent ແລະ overvoltage;
10) ສາມາດວັດແທກເວລາປະຕິບັດການປະຈຸບັນຂອງສາຍແຂວນ, ແລະສາມາດ synchronously ບັນທຶກເວລາປະຕິບັດການລັອກ;
ສ່ວນຊອບແວ:
11) ເສັ້ນໂຄ້ງປັດຈຸບັນແບບໄດນາມິກ, ຟັງຊັນສະແດງເສັ້ນໂຄ້ງປັດຈຸບັນສະເລ່ຍ (RMS), ສູງສຸດ ແລະຕໍ່າສຸດ, ການສະແດງມູນຄ່າປັດຈຸບັນຕາມເວລາຈິງ, ສະຖິຕິສູງສຸດຂອງປັດຈຸບັນທາງປະຫວັດສາດ.
ຕົວກໍານົດການລະອຽດ:
| ວິທີການຜະລິດ |
SPWM |
| ປ້ອນຂໍ້ມູນ |
ໄລຍະ |
3φ4W |
| ແຮງດັນ |
380V±10% |
| ຄວາມຖີ່ |
47HZ-63HZ |
| ອອກ |
ໄລຍະ |
1φ2W |
| ແຮງດັນຄົງທີ່ແຫຼ່ງປັດຈຸບັນ |
10V(ແຮງດັນເປີດ) |
| ປະຈຸບັນຊີ້ໃຫ້ເຫັນແຫຼ່ງປັດຈຸບັນຄົງທີ່ |
0~1000A ປັບໄດ້ |
| ຄວາມຖີ່ |
45HZ~200HZ |
| ສາຍໄຟ |
ການສະກັດເອົາແຖບທອງແດງ |
| ການປົກປ້ອງ |
ວົງຈອນອີເລັກໂທຣນິກລະບຸໄດ້ໄວເກີນກະແສ, ແຮງດັນເກີນ, ອຸນຫະພູມເກີນອັດຕະໂນມັດປິດ, ສະຖານະທີ່ບໍ່ແມ່ນການທົດສອບ VA=0 |
| ຈໍ LED |
ແຮງດັນ Vms, ແຂນປະຈຸບັນ, ຄວາມຖີ່ Fre, ພະລັງງານ Wattage, ປັດໄຈພະລັງງານ PF |
| ອັດຕາສ່ວນການປັບພະລັງງານ |
0.1% |
| ອັດຕາການປັບການໂຫຼດ |
0.5%FS |
| ອັດຕາການບິດເບືອນຮູບຄື້ນ |
3%(ການໂຫຼດຕ້ານທານອັນບໍລິສຸດ) |
| ກົດລະບຽບຄວາມຖີ່ |
0.01% |
| ຄວາມລະອຽດແຮງດັນ |
0.1V |
| ຄວາມລະອຽດປັດຈຸບັນ |
0.1(A) |
| ຄວາມລະອຽດຄວາມຖີ່ |
0.1HZ |
| ຄວາມຖືກຕ້ອງຂອງການວັດແທກ |
ແຮງດັນ |
0.5%FS+5dgt |
| ປັດຈຸບັນ |
0.5%FS+5dgt |
| ວັດແທກ |
0.5%FS+5dgt |
| ຄວາມຖີ່ |
0.01%FS+5dgt |
| ຕັ້ງຄວາມຖືກຕ້ອງ |
ປັດຈຸບັນ |
0.5%FS |
| ຄວາມຖີ່ |
0.3%FS |
| ການປົກປ້ອງ |
ເກີນປະຈຸບັນ; ເກີນອຸນຫະພູມ; ໂຫຼດເກີນ |
| ສະພາບແວດລ້ອມ |
ອຸນຫະພູມ: 0℃-45℃; ຄວາມຊຸ່ມຊື່ນທີ່ກ່ຽວຂ້ອງ: 0-90% (ລັດບໍ່ condensing); ລະດັບຄວາມສູງ: 1500m |
| ປະຕິກິລິຍາຂອງ insulation |
500Vdc 20MQ ຫຼືສູງກວ່າ |
| ການສນວນແຮງດັນໄຟຟ້າ |
1800Vac/5mA/1ນາທີ |
| ໂໝດເຮັດຄວາມເຢັນ |
ພັດລົມບັງຄັບ |
| W*H*D(mm) |
W:550 H:700 ບໍ່ມີລູກປືນ D700 |
| ປະສິດທິພາບ |
≥98% |
| ສິ່ງລົບກວນ |
≤60DB(1m) |
| ລະດັບການປົກປ້ອງ |
IPX20 |
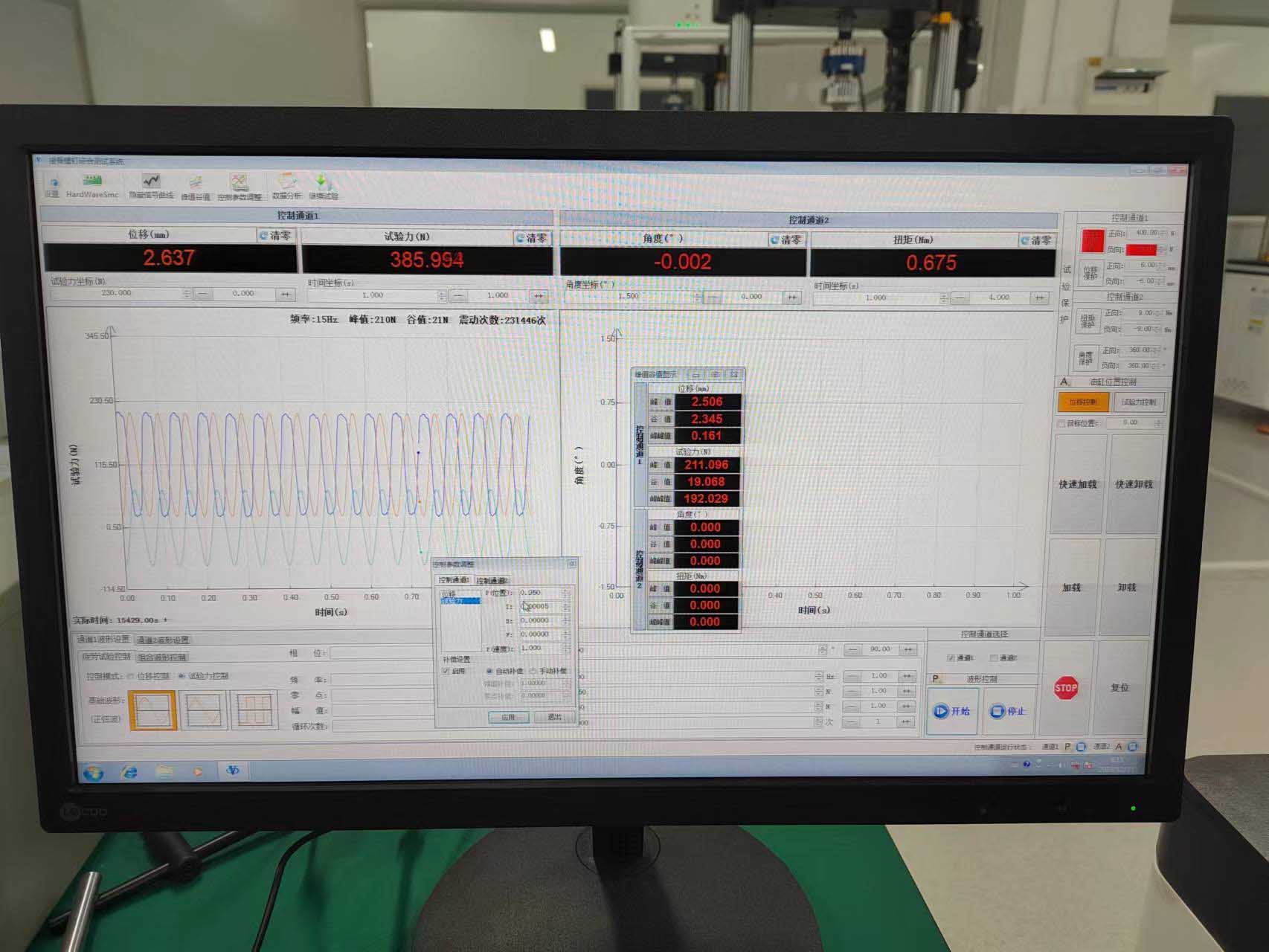
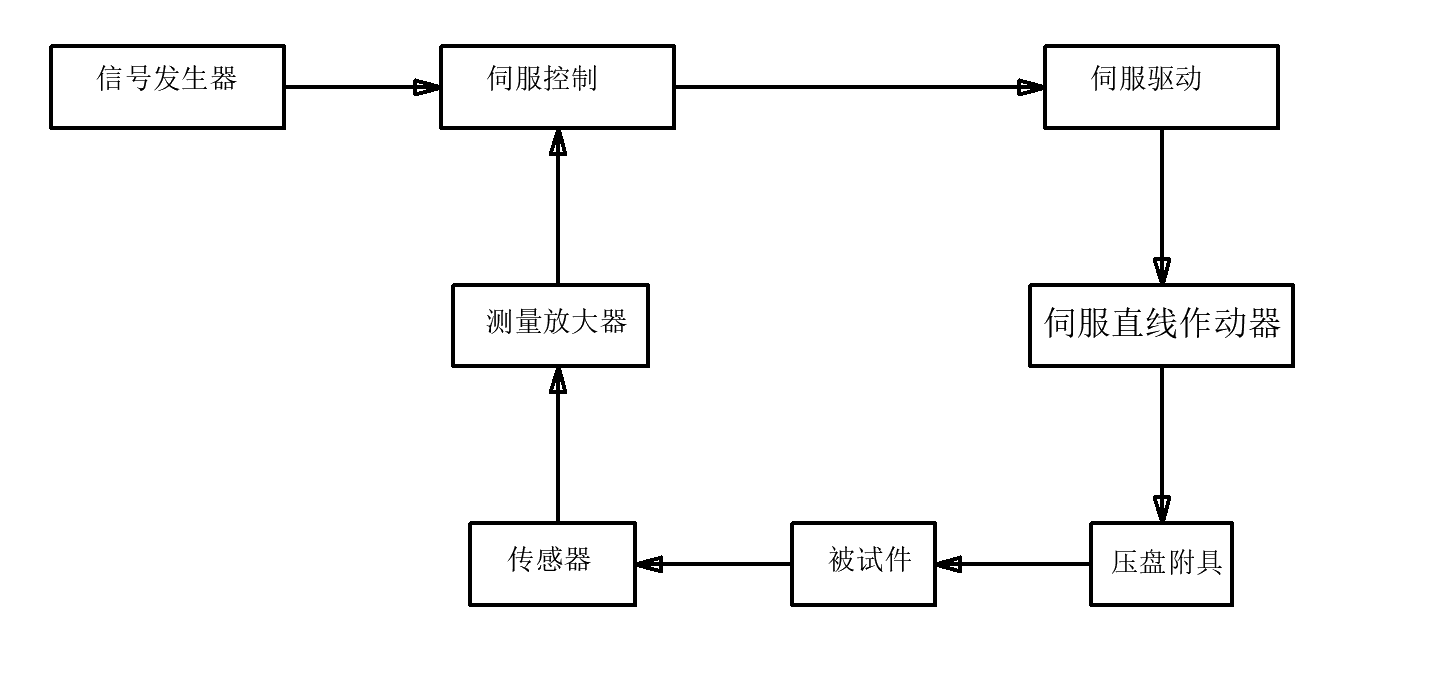
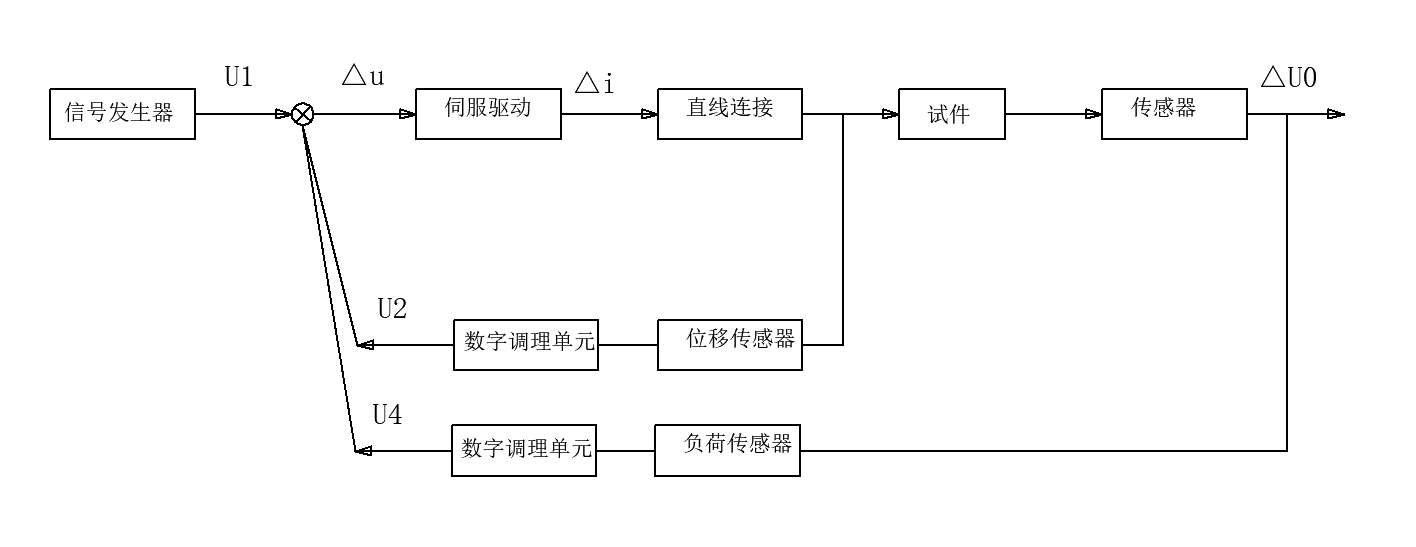
5. ລະບົບຄວບຄຸມ:
5.1 ຈໍານວນຊ່ອງຄວບຄຸມ: 2, ລວມທັງສາມ loops ຄວບຄຸມວົງປິດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຍ້າຍການທົດສອບແລະການຜິດປົກກະຕິຂອງການທົດສອບ, ມີຮູບແບບການຄວບຄຸມ undisturbed ຟັງຊັນສະຫຼັບກ້ຽງ. ຄວາມຖີ່ຂອງການໂຫຼດຂໍ້ມູນການຄວບຄຸມວົງປິດສູງສຸດແມ່ນ 1kHz; ຄວາມລະອຽດຂອງຕົວຄວບຄຸມ A/D ແລະ D/A ແມ່ນ 16 bits. ຊ່ວງຄວາມຖີ່ສັນຍານ: 0.001Hz ~ 100Hz; ຮູບແບບຄື້ນສັນຍານ: ຄື້ນ sine, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມມົນ, ຄື້ນ sawtooth, ແລະອື່ນໆ ຫນ່ວຍບໍລິການຂັບ servo ຖືກນໍາໃຊ້ເພື່ອຂັບ motor linear; servo ຫ່າງໄກສອກຫຼີກເຮັດໃຫ້ການທໍາງານການຄວບຄຸມສໍາລັບການຄວບຄຸມໄລຍະໄກ motor linear drive power; ຕົວຄວບຄຸມມີຫນ້າທີ່ກໍານົດຂອບເຂດກໍານົດພາລາມິເຕີແລະຫນ້າທີ່ປ້ອງກັນຢ່າງສົມບູນ. ນອກເຫນືອຈາກການປົກປ້ອງ overload (110%) ແລະການປ້ອງກັນ overcurrent ຂັ້ນສອງ, ມັນຍັງມີການປ້ອງກັນການໂຫຼດແບບເຄື່ອນໄຫວ, ການປ້ອງກັນການໂຫຼດ static, ການປ້ອງກັນຄວາມຖີ່ແລະອື່ນໆ.
5.2 ເຄື່ອງທົດສອບແບບເຄື່ອນໄຫວ (ລະບົບ) ຊອບແວຄວບຄຸມ: ຊອບແວການຈັດການລະບົບ: ຊອບແວເປັນພື້ນຖານຂອງຕົວຄວບຄຸມ servo ດິຈິຕອລທັງໝົດ, ໜ້າທີ່ຫຼັກຂອງມັນແມ່ນການຈັດການຊັບພະຍາກອນຮາດແວຂອງລະບົບຄວບຄຸມ, ກຳນົດເຊັນເຊີ, ປັບຕົວກໍານົດການຄວບຄຸມດິຈິຕອນ, ກໍານົດການປົກປ້ອງ, ສະແດງຮູບແບບການຄວບຄຸມໃນປະຈຸບັນ, ແລະຟັງຊັນຂອງເຄື່ອງກໍາເນີດໄຟຟ້າສະຖານະການແລະການປັບຕົວເຊັນເຊີ. oscilloscope ດິຈິຕອນ trace ຄູ່, servo ammeter ດິຈິຕອນແລະ 6 voltmeters ດິຈິຕອນແມ່ນສະຫນອງໃຫ້ສໍາລັບການສະແດງຂໍ້ມູນການທົດສອບໃນເວລາທີ່ແທ້ຈິງ. ຊອບແວເຄື່ອງກໍາເນີດຟັງຊັນ: ຊອບແວສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການທົດສອບຄວາມກວ້າງຂອງຂວາງຄົງທີ່, ເຊັ່ນ: ການທົດສອບຄວາມເຫນື່ອຍລ້າຄວາມກວ້າງຄົງທີ່ຄົງທີ່. ຊອບແວເຄື່ອງກໍາເນີດຟັງຊັນຈະຕິດຕາມແລະແກ້ໄຂຄ່າສູງສຸດແລະຮ່ອມພູຂອງປະລິມານການຄວບຄຸມ (ເຊັ່ນການໂຫຼດ) ເພື່ອຮັບປະກັນວ່າຄ່າຄວາມຜິດພາດແບບເຄື່ອນໄຫວປົກກະຕິຂອງແຕ່ລະຈຸດສູງສຸດແມ່ນ ±0.5% FS ໃນລະຫວ່າງຂະບວນການທົດສອບທັງຫມົດ. ໃນລະຫວ່າງການທົດສອບ, ຜູ້ປະຕິບັດການສາມາດປ່ຽນຈຸດສູງສຸດ, ຮ່ອມພູແລະຄວາມຖີ່ແບບເຄື່ອນໄຫວ, ແລະຍັງສາມາດປະຕິບັດການຖືສັນຍານຄູ່ມືຫຼືອັດຕະໂນມັດ. ຖ້າໄລຍະເວລາການຖືສັນຍານອັດຕະໂນມັດຖືກຕັ້ງໄວ້, ແຕ່ລະຄັ້ງຈໍານວນຂອງຮອບວຽນການທົດສອບເພີ່ມຂຶ້ນຫນຶ່ງຮອບວຽນ, ຊອບແວຈະຮັກສາສັນຍານອັດຕະໂນມັດໃນລະດັບທີ່ກໍານົດໄວ້ເພື່ອອໍານວຍຄວາມສະດວກໃນການວັດແທກຂໍ້ມູນການທົດສອບບາງຢ່າງ (ເຊັ່ນ: ຄວາມຍາວຂອງຮອຍແຕກຕາ) . ຮູບແບບຄື້ນທາງເລືອກຂອງຊອບແວແມ່ນຄື້ນ sine, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມມົນ, ຄື້ນສະຫຼຽງ, ຄື້ນ sawtooth, ຄື້ນລວມ, ການທົດສອບຄື້ນສະຫຼຽງລວມ. ໃນຕອນທ້າຍຂອງການທົດສອບ, ຊອບແວຈະຊ່ວຍປະຢັດບາງຂໍ້ມູນທີ່ສໍາຄັນ, ເຊັ່ນ: ການໂຫຼດການທົດສອບ, ຄວາມຖີ່, ຈໍານວນຂອງຮອບວຽນແລະເວລາການທົດສອບ. ຊອບແວຍັງສາມາດປະຕິບັດການທົດສອບ static ງ່າຍດາຍ. ຊອບແວການທົດສອບ Multifunctional: ຊອບແວເປັນຊອບແວທົດສອບທີ່ມີຄວາມຍືດຫຍຸ່ນ, ເຮັດວຽກຢ່າງເຕັມທີ່, ຜູ້ໃຊ້ສາມາດໃຊ້ມັນເພື່ອອອກແບບວິທີການທົດສອບພິເສດ, ແຕ່ບໍ່ຈໍາເປັນຕ້ອງມີການຂຽນໂປລແກລມ. ຊອບແວນີ້ມີຄວາມຫລາກຫລາຍຂອງຫນ້າທີ່ຄວບຄຸມ, ຫນ້າທີ່ເກັບຂໍ້ມູນແລະຫນ້າທີ່ຊ່ວຍອື່ນໆຂອງຕົວຄວບຄຸມ servo ແມ່ນເຮັດຢູ່ໃນກະດານໃນຮູບແບບຂອງ ICONS, ຜູ້ໃຊ້ສາມາດລາກແລະວາງ ICONS ຟັງຊັນເຫຼົ່ານີ້ເຂົ້າໄປໃນກະດານກໍານົດການທົດສອບດ້ວຍຫນູ, ແລະປະສົມປະສານ. ເຂົາເຈົ້າຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້ຈະ, ທ່ານສາມາດທົດສອບຕາມວິທີການທີ່ຜູ້ໃຊ້ກໍານົດ.
ຊອບແວເຄື່ອງສ້າງຟັງຊັນ: ຊອບແວສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການທົດສອບຄວາມກວ້າງຂອງຂວາງຄົງທີ່ ເຊັ່ນ: ການທົດສອບຄວາມເຫນື່ອຍລ້າໃນຄວາມກວ້າງຄົງທີ່, ການທົດສອບການຂະຫຍາຍຕົວຂອງຮອຍແຕກຄວາມເມື່ອຍລ້າຄົງທີ່, ແລະອື່ນໆ. ຊອບແວເຄື່ອງກໍາເນີດຟັງຊັນຈະຕິດຕາມ ແລະແກ້ໄຂຈຸດສູງສຸດ ແລະຮ່ອມພູໂດຍອັດຕະໂນມັດ. ຄ່າຂອງປະລິມານການຄວບຄຸມ (ເຊັ່ນການໂຫຼດ) ເພື່ອຮັບປະກັນວ່າປົກກະຕິ ຄ່າຄວາມຜິດພາດແບບເຄື່ອນໄຫວຂອງແຕ່ລະຈຸດສູງສຸດແມ່ນ ±0.5%FS ໃນລະຫວ່າງຂະບວນການທົດສອບທັງໝົດ. ໃນລະຫວ່າງການທົດສອບ, ຜູ້ປະຕິບັດການສາມາດປ່ຽນຈຸດສູງສຸດ, ຮ່ອມພູແລະຄວາມຖີ່ແບບເຄື່ອນໄຫວ, ແລະຍັງສາມາດປະຕິບັດການຖືສັນຍານຄູ່ມືຫຼືອັດຕະໂນມັດ. ຖ້າໄລຍະເວລາການຖືສັນຍານອັດຕະໂນມັດຖືກຕັ້ງໄວ້, ແຕ່ລະຄັ້ງຈໍານວນຂອງຮອບວຽນການທົດສອບເພີ່ມຂຶ້ນຫນຶ່ງຮອບວຽນ, ຊອບແວຈະຮັກສາສັນຍານອັດຕະໂນມັດໃນລະດັບທີ່ກໍານົດໄວ້ເພື່ອອໍານວຍຄວາມສະດວກໃນການວັດແທກຂໍ້ມູນການທົດສອບບາງຢ່າງ (ເຊັ່ນ: ຄວາມຍາວຂອງຮອຍແຕກຕາ) . ຮູບແບບຄື້ນທາງເລືອກຂອງຊອບແວແມ່ນຄື້ນຊີນ, ຄື້ນສາມຫລ່ຽມແລະຄື້ນສີ່ຫຼ່ຽມມົນ. ຫຼັງຈາກການທົດສອບ, ຊອບແວຈະຊ່ວຍປະຢັດຂໍ້ມູນທີ່ສໍາຄັນຈໍານວນຫນຶ່ງ, ເຊັ່ນ: ການໂຫຼດການທົດສອບ, ຄວາມຖີ່, ຈໍານວນຂອງຮອບວຽນແລະເວລາການທົດສອບ. ຊອບແວຍັງສາມາດປະຕິບັດການທົດສອບ static ງ່າຍດາຍ.
ຊອບແວທົດສອບອະເນກປະສົງ: ຊອບແວເປັນຊອບແວທົດສອບທີ່ມີຄວາມຍືດຫຍຸ່ນ, ເຮັດວຽກໄດ້ເຕັມທີ່, ຜູ້ໃຊ້ສາມາດໃຊ້ມັນເພື່ອອອກແບບວິທີການທົດສອບພິເສດ, ແຕ່ບໍ່ຕ້ອງການການຂຽນໂປຼແກຼມ. ຊອບແວນີ້ມີຄວາມຫລາກຫລາຍຂອງຫນ້າທີ່ຄວບຄຸມ, ຫນ້າທີ່ເກັບຂໍ້ມູນແລະຫນ້າທີ່ຊ່ວຍອື່ນໆຂອງຕົວຄວບຄຸມ servo ແມ່ນເຮັດຢູ່ໃນກະດານໃນຮູບແບບຂອງ ICONS, ຜູ້ໃຊ້ສາມາດລາກແລະວາງ ICONS ຟັງຊັນເຫຼົ່ານີ້ເຂົ້າໄປໃນກະດານກໍານົດການທົດສອບດ້ວຍຫນູ, ແລະປະສົມປະສານ. ເຂົາເຈົ້າຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້ຈະ, ທ່ານສາມາດທົດສອບຕາມວິທີການທີ່ຜູ້ໃຊ້ກໍານົດ.
5.3. ຕົວກໍານົດການດ້ານວິຊາການຂອງການຄວບຄຸມ:
5.3.1 ໜ່ວຍປັບສັນຍານແບບດິຈິຕອລທັງໝົດ: ແຮງທົດສອບ, ການເຄື່ອນທີ່ຂອງວົງຄວບຄຸມວົງປິດ.
5.3.2 ຄວາມຖີ່ຂອງການໂຫຼດຂໍ້ມູນການຄວບຄຸມແບບວົງປິດສູງສຸດແມ່ນ 10kHz.
5.3.3 ຄວາມລະອຽດ A/D ຄວບຄຸມແມ່ນ 18 ບິດ ແລະ ຄວາມລະອຽດ D/A ແມ່ນ 16 ບິດ.
5.3.4 ຊ່ວງຄວາມຖີ່ສັນຍານ: 0.01Hz ~ 100Hz.
5.3.5 ຮູບແບບຄື້ນສັນຍານ: ຄື້ນໄຊນ, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມ, ຄື້ນໂປຣແກຣມ.
5.3.6 ສາມາດຮັບຮູ້ເຄິ່ງໄລຍະເວລາການຄວບຄຸມການເຄື່ອນຍ້າຍເຄິ່ງໄລຍະ, ຫຼືຮູບແບບຄື້ນທີ່ກຳນົດເອງຂອງລູກຄ້າເພື່ອເຮັດການທົດສອບອື່ນໆຂອງຕົວຢ່າງ
5.3.7 ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມ: ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມສະຖິດແມ່ນ 0.3% FS, ແລະຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມແບບເຄື່ອນໄຫວປົກກະຕິແມ່ນ 0.5% FS.
5.3.8 ຟັງຊັນຄວບຄຸມການເລີ່ມຕົ້ນ ແລະຢຸດເຊີໂວຣີໄກ.
5.3.9 ຄວາມຈຸຂອງຕົວນັບ: ບໍ່ຈຳກັດເວລາ.
5.3.10 I/O input ແລະ output units ທີ່ຈໍາເປັນອື່ນໆ: ສີ່ inputs ປຽບທຽບ, ສີ່ analog output interfaces; ສີ່ input ດິຈິຕອລແລະສີ່ການໂຕ້ຕອບຜົນຜະລິດດິຈິຕອນ (ທາງເລືອກ).
6. ການຕັ້ງຄ່າອື່ນໆ ແລະອຸປະກອນເສີມທີ່ຈຳເປັນ:
ກອບປະຕິກິລິຍາສຳລັບການປັບຕົວເຊັນເຊີການໂຫຼດ;
ຕັ້ງຄ່າອຸປະກອນເສີມການບີບອັດ;
ມີໄສ້ຄວາມປອດໄພ,
ການຈັບຄູ່ອຸປະກອນ ແລະ ເຄື່ອງມືສຳລັບການທົດສອບການລະງັບ ແລະ ການຍຶດສາຍ
7. ຕົວຊີ້ວັດການປະຕິບັດດ້ານວິຊາການຫຼັກ:
1. ແຮງທົດສອບສະຖິດສູງສຸດ: ±1150N, ຄວາມຖືກຕ້ອງຂອງການສະແດງຜົນສະຖິດ:, ຄວາມຖືກຕ້ອງຂອງການສະແດງຜົນຈາກ 5% ຕໍ່ໄຟລ໌ ±0.5%;
2. ແຮງທົດສອບໄດນາມິກສູງສຸດ: ±1150N; ຄວາມຜັນຜວນແບບໄດນາມິກ: ບໍ່ເກີນ ±0.5%FS.
3. ຄວາມກວ້າງສູງສຸດຂອງຕົວກະຕຸ້ນ: ±100mm, ສະແດງຄວາມຖືກຕ້ອງ: ±0.5%FS.
4. ຊ່ວງການເຮັດວຽກ: 0-20Hz.
5. ຮູບແບບການຄວບຄຸມ: ການຄວບຄຸມການໂຫຼດ, ການຄວບຄຸມການຍ້າຍ;
6. ຮູບແບບຄື້ນທົດສອບຕົ້ນຕໍ: ຄື້ນ sine, ຄື້ນສີ່ຫຼ່ຽມມົນ, ຄື້ນສາມຫລ່ຽມ, ຄື້ນສະຫຼຽງແລະຮູບແບບຄື້ນຂາເຂົ້າພາຍນອກ;
7. ພະລັງງານເຄື່ອງດຽວ :11kw
8. ພະລັງງານຂອງແຫຼ່ງປະຈຸບັນດຽວ: 10kw
9. ຂະໜາດລວມ 750*700*2700 ແລະ 750*700*2250
 {7082}
{7082}

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese









 {02909}
{02909}