ເຄື່ອງທົດສອບ
 {608209
{608209
1 .1 ຄຸນສົມບັດ
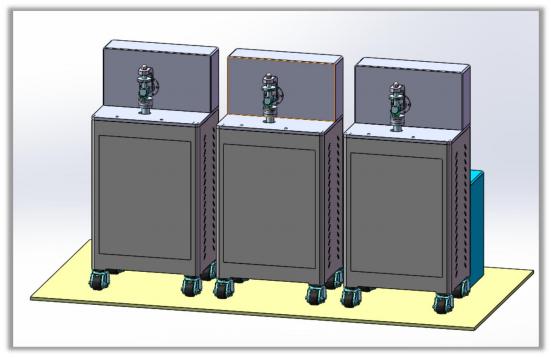
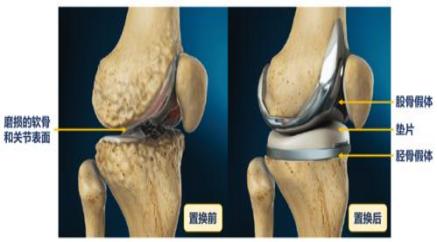
ເຄື່ອງທົດສອບການສວມໃສ່ຫົວເຂົ່າ HK 3 ປະກອບດ້ວຍສາມສ່ວນຄື: ໜ່ວຍທົດສອບ, ສ່ວນຕິດຕັ້ງ ແລະສ່ວນຄວບຄຸມເອເລັກໂຕຣນິກ. ມັນສາມາດຈໍາລອງການສວມໃສ່, fatigue ແລະການປອກເປືອກຂອງການປູກຝັງຫົວເຂົ່າແລະຂະບວນການຄວາມເສຍຫາຍອື່ນໆ, ແລະສາມາດທົດສອບ 3 ປວດຂໍ້ເຂົ່າໃນເວລາດຽວກັນການປູກຝັງ. ເຄື່ອງທົດສອບນີ້ອັດຕະໂນມັດຄວບຄຸມຜົນບັງຄັບໃຊ້ການທົດສອບ, ເວລາທົດສອບແລະຄວາມໄວ, ແລະວັດແທກແຮງທົດສອບແລະແຮງບິດໃນເວລາທີ່ແທ້ຈິງ. ມັນສາມາດໃຊ້ໄດ້ກັບການຜະລິດ, ການນໍາໃຊ້ແລະການຄົ້ນຄວ້າຂອງຂາທຽມຮ່ວມກັນຂອງຫົວເຂົ່າແລະຂົງເຂດທາງການແພດອື່ນໆທີ່ກ່ຽວຂ້ອງ.
ໄດ spindle ຮັບຮອງເອົາມໍເຕີ AC servo ແລະລະບົບການຄວບຄຸມທີ່ນໍາເຂົ້າ, ເຊິ່ງສາມາດຮັບຮູ້ກົດລະບຽບຄວາມໄວ stepless ແລະຄວາມຕ້ອງການຄິດໄລ່ແຮງບິດຄົງທີ່ / ຜົນບັງຄັບໃຊ້ axial ຄົງທີ່ພາຍໃນຂອບເຂດຄວາມໄວ; ຜົນບັງຄັບໃຊ້ການທົດສອບແມ່ນຖືກນໍາໃຊ້ໂດຍໃຊ້ລະບົບການໂຫຼດຂອງສະກູ. ຜົນບັງຄັບໃຊ້ການທົດສອບແມ່ນຖືກນໍາໃຊ້ຢ່າງຕໍ່ເນື່ອງແລະເຊື່ອຖືໄດ້, ແລະຜົນບັງຄັບໃຊ້ການທົດສອບສາມາດຖືກກໍານົດໂດຍຜູ້ປະຕິບັດງານໃນການໂຕ້ຕອບຄອມພິວເຕີ; ຄວາມໄວ spindle, ຕົວກໍານົດການເຊັ່ນ: ຈໍານວນຂອງການປະຕິວັດ, ຜົນບັງຄັບໃຊ້ການທົດສອບ, ແລະເວລາການທົດສອບແມ່ນທັງຫມົດຄວບຄຸມໂດຍຄອມພິວເຕີ, ເຊິ່ງສາມາດເກັບກໍາຂໍ້ມູນການທົດສອບໃນເວລາທີ່ແທ້ຈິງແລະວາງແຜນໃຫ້ເຂົາເຈົ້າ. ເສັ້ນໂຄ້ງການທົດສອບທີ່ສອດຄ້ອງກັນສາມາດເຮັດໄດ້, ແລະຂໍ້ມູນການທົດສອບຫຼືເສັ້ນໂຄ້ງສາມາດຖືກເກັບໄວ້, ດຶງຂໍ້ມູນແລະພິມອອກຕາມຄວາມປະສົງ.
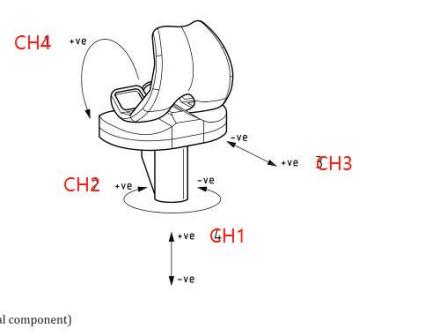
ສາມທາງ servo motor ຂັບເຄື່ອນລະບົບການໂຫຼດທີ່ມີອົງປະກອບທີ່ແຕກຕ່າງກັນສໍາລັບການສໍາເລັດຮູບຮ່ວມກັນ AP, ພືດຫມູນວຽນ, flexion ການລັກພາຕົວຫນີແລະການເຄື່ອນໄຫວອື່ນໆ, ໂມດູນເຊັນເຊີຜົນບັງຄັບໃຊ້ສີ່ອົງປະກອບທົດສອບແຮງບິດແກນ, ແຮງດັນແນວນອນແລະ flexion ຕາມລໍາດັບ Torque ໃນລະຫວ່າງການຂະຫຍາຍ. , ການປະກອບ servo ສາມທາງທີ່ຕິດຕັ້ງດ້ວຍຕົວເຂົ້າລະຫັດ rotary ຄວາມແມ່ນຍໍາສູງ, ການວັດແທກມຸມໃນເວລາທີ່ແທ້ຈິງ, ແລະການເຄື່ອນຍ້າຍແລະສະຫນອງແຫຼ່ງຂໍ້ມູນທີ່ມີປະສິດທິພາບສໍາລັບການຄວບຄຸມຄອມພິວເຕີເຈົ້າພາບ.
ແຕ່ລະກົນໄກການເຄື່ອນໄຫວແມ່ນຄວບຄຸມ ແລະປະສານງານຢ່າງເປັນເອກະລາດ, ມີສາມສະຖານີ ແລະ 15 ແກນເພື່ອເຮັດສໍາເລັດການຂັດຂອງອົງປະກອບຮ່ວມກັນຂອງການທົດສອບຄວາມເສຍຫາຍ.
1.2ຂໍ້ມູນຈຳເພາະຫຼັກ
1. ຊອບແວປະຕິບັດການເຄື່ອງມືທີ່ມີສ່ວນຕິດຕໍ່ການເຮັດວຽກຂອງຈີນ.
2. ຊອບແວທີ່ແລ່ນເຄື່ອງມືພ້ອມນຳໃຊ້ແລ້ວ, ບໍ່ຈຳເປັນຕ້ອງມີຊອບແວພິເສດ.
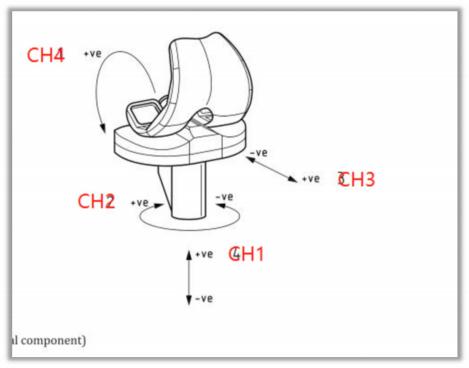
3. ລະດັບອິດສະລະ: ແຕ່ລະສະຖານີທົດສອບສາມາດຮັບຮູ້ເຖິງ flexion / extension, ການຫມຸນພາຍໃນ / ການຫມຸນພາຍນອກ, ການເຄື່ອນໄຫວໄປຂ້າງຫນ້າ / ກັບຄືນໄປບ່ອນ, ການຄວບຄຸມການເຄື່ອນໄຫວສາມມິຕິລະດັບ, ແລະການໂຫຼດກໍາລັງຕາມແກນ, ແລະແຕ່ລະລະດັບຂອງອິດສະລະສາມາດ. ຄວບຄຸມ. ທັງເຊັນເຊີແລະຜົນບັງຄັບໃຊ້ໄດ້ຖືກກວດພົບ; ການເຄື່ອນໄຫວທີ່ບໍ່ເສຍຄ່າໃນທິດທາງພາຍໃນ / ພາຍນອກແລະທິດທາງພາຍໃນ / ພາຍນອກແມ່ນເປັນໄປໄດ້.
4. ຄວາມບໍ່ເປັນເສັ້ນຂອງເຊັນເຊີບໍ່ໃຫຍ່ກວ່າ 0.10% ຂອງຂະໜາດເຕັມ, ແລະ hysteresis ບໍ່ໃຫຍ່ກວ່າ 0. 10%, ການເຮັດຊ້ຳບໍ່ເກີນ 0.05% ຂອງຂະໜາດເຕັມ.
5. ໄລຍະເຊັນເຊີການກະຈັດ ແລະ ການກະຈັດ: ການຍ້າຍຕາມແກນ 100mm, flexion/extension 120, rotation ພາຍໃນ/External rotation 20, anterior/posterior displacement 15mm, medial / lateral displacement /val, 5mm,
6. ຄວາມອາດສາມາດໃນການໂຫຼດ ແລະໄລຍະເຊັນເຊີຜົນບັງຄັບໃຊ້: ການໂຫຼດຕາມແກນ 3KN, ແຮງບິດພາຍໃນ / ພາຍນອກ 20Nm, ການໂຫຼດຕໍ່ / ຖອຍຫຼັງ 1KN .
7. ຄວາມຖືກຕ້ອງຂອງການບັງຄັບແລະການເຄື່ອນຍ້າຍ: ຄວາມຜິດພາດຂອງຄວາມກວ້າງຂວາງຂອງຜົນບັງຄັບໃຊ້ແລະການເຄື່ອນຍ້າຍພາຍໃນຫນຶ່ງຮອບວຽນບໍ່ໃຫ້ເກີນທີ່ກໍານົດໄວ້ສູງສຸດ ຄວາມຜິດພາດໄລຍະສູງສຸດບໍ່ໃຫ້ເກີນ 3% ຂອງຮອບວຽນເຕັມ. ເຄື່ອງມືດັ່ງກ່າວໄດ້ຖືກທົດສອບໂດຍສອດຄ່ອງກັບ ISO 14243-1 ແລະ ISO 14243-3 ໃນແຕ່ລະລະດັບເສລີພາບທີ່ສາມາດຄວບຄຸມໄດ້. ເສັ້ນໂຄ້ງທີ່ວັດແທກໄດ້ ແລະຄ່າ deviation ຂອງເຊັນເຊີຜົນບັງຄັບໃຊ້ ແລະການເຄື່ອນຍ້າຍ .
8. ມັນມີຟັງຊັນການປ້ອນຂໍ້ມູນອະນາລັອກແປດຊ່ອງ ແລະສາມາດຊິ້ງກັບຂໍ້ມູນພາຍນອກໄດ້.
9. ຄວາມຖີ່ການທົດສອບ: 1Hz , ຄວາມຖືກຕ້ອງ 0.1Hz.
10. ລະບົບການຄວບຄຸມ: ມັນຄວນຈະໄດ້ຮັບການຕິດຕັ້ງດ້ວຍຕົວຄວບຄຸມ servo ຫຼາຍສະຖານີ, ຫຼາຍຊ່ອງແຍກຕ່າງຫາກເພື່ອບັນລຸການຄວບຄຸມອັດຕະໂນມັດຂອງວົງປິດຂອງຜົນບັງຄັບໃຊ້ແລະການເຄື່ອນຍ້າຍ.
11. ຕົວຄວບຄຸມຄວນຈະສາມາດປະຕິບັດການຊົດເຊີຍການຄວບຄຸມຄ່າສູງສຸດເຖິງຮ່ອມພູ ເພື່ອຮັບປະກັນວ່າຄ່າສູງສຸດທີ່ຕ້ອງການໂດຍສັນຍານສາມາດບັນລຸໄດ້ຢ່າງຖືກຕ້ອງເມື່ອຮູບແບບຄື້ນຮອບວຽນຖືກໃຊ້ເປັນຄຳສັ່ງຄວບຄຸມ.
12. ມັນຄວນຈະສາມາດປະຕິບັດການທົດສອບການຂຽນໂປລແກລມຂອງເສັ້ນໂຄ້ງ gait ແບບກຳນົດເອງ; ສາມາດປະຕິບັດການຄວບຄຸມຄູ່ມືແຕ່ລະຂັ້ນຕອນຂອງສິດເສລີພາບໃນການຄວບຄຸມ; ແລະສາມາດສົ່ງອອກຂໍ້ມູນດິບໃນຮູບແບບ Excel.
13. ໃນລະຫວ່າງການທົດສອບ, ຊອບແວຄວນຈະສາມາດສະທ້ອນເຖິງເສັ້ນໂຄ້ງຂອງແຮງ ແລະການເຄື່ອນຍ້າຍຂອງແຕ່ລະສະຖານີໃນເວລາຈິງ, ແລະລະບົບການຄວບຄຸມ. ລະບົບຄວນຈະສາມາດປັບເສັ້ນໂຄ້ງການເຄື່ອນໄຫວຂອງຕົວຢ່າງໂດຍອັດຕະໂນມັດເພື່ອໃຫ້ກົງກັບເສັ້ນໂຄ້ງເປົ້າໝາຍໂດຍບໍ່ມີການແຊກແຊງດ້ວຍມື.
14. ອັດຕາການຄວບຄຸມວົງປິດໃນເວລາຈິງ ≤ 6kHz , ຍົກເວັ້ນສຳລັບໂໝດຄວບຄຸມການບັງຄັບ ແລະການເຄື່ອນຍ້າຍ, ຕົວຄວບຄຸມຄວນຈະສາມາດປະຕິບັດໂໝດຄວບຄຸມຕົວແປທີ່ຄຳນວນໄດ້.
15. ຄວາມຖີ່ຂອງການເກັບຕົວຢ່າງດິຈິຕອລບໍ່ຄວນຕ່ຳກວ່າ 100 kHz , ແລະວິທີການເກັບຕົວຢ່າງຄວນປະກອບມີ: ຄ່າສູງສຸດ, ຄ່າຮ່ອມພູ, ເວລາ, ສູງສຸດ, ຕ່ຳສຸດ, ສະເລ່ຍ, ຮອບວຽນ / logarithm, ແລະອື່ນໆ.
16. ມັນມີໂໝດຄູ່, ຊ່ອງຕິຊົມຊ່ອງຈຳກັດຮູບແບບການເຮັດວຽກຂອງຄຳສັ່ງ.
17. ມັນມີຫນ້າທີ່ຂອງຕົນເອງການກວດສອບການຕື່ນເຕັ້ນຂອງເຊັນເຊີທີ່ຂາດໄປ .
18. ອຸນຫະພູມ: ອຸນຫະພູມປານກາງຂອງເຄື່ອງຫຼໍ່ລື່ນສາມາດຮັກສາຢູ່ທີ່ (37 ℃) ແລະມີລະບົບຄວບຄຸມອຸນຫະພູມ.
19. ຕົວກາງຂອງເຄື່ອງຫຼໍ່ລື່ນ : ພື້ນຜິວຮ່ວມກັນສາມາດຖືກຈຸ່ມຢູ່ໃນຕົວກາງທີ່ຫລໍ່ລື່ນໄດ້, ແລະຕົວກາງຂອງເຄື່ອງຫຼໍ່ລື່ນຄວນຈະຖືກປະທັບຕາໂດຍບໍ່ມີການຮົ່ວໄຫຼ; ແລະມີອຸປະກອນຕິດຕາມການຮົ່ວໄຫຼ.
20. ອົງປະກອບຂອງການທົດສອບ: ມີເຄື່ອງມືທີ່ຈໍາເປັນສໍາລັບການທົດສອບ, ການໂຫຼດ workstation ແລະ loading ສໍາລັບການເຄື່ອນໄຫວທັງຫມົດ The immersion workstation ສະຫນອງຕົວຢ່າງມາດຕະຖານອ້າງອີງສໍາລັບການປັບອຸປະກອນແລະການແກ້ໄຂບັນຫາ.
21. ປຸ່ມຢຸດສຸກເສີນ: ອຸປະກອນຄວນຕິດຕັ້ງປຸ່ມຢຸດສຸກເສີນ.
22. ການປົກປ້ອງຄວາມປອດໄພ: ອຸປະກອນຄວນໄດ້ຮັບການຕິດຕັ້ງດ້ວຍຝາປົກປ້ອງກັນວັດສະດຸ thermoplastic polycarbonate ທີ່ຊັດເຈນແລະໂປ່ງໃສ; ມີອຸປະກອນ interlock ຄວາມປອດໄພ. ເມື່ອເປີດປະຕູຝາປ້ອງກັນ, ອຸປະກອນຄວນຈະສາມາດຢຸດການທົດສອບໂດຍອັດຕະໂນມັດ.
1.3 ສະພາບການເຮັດວຽກ
ອຸນຫະພູມຫ້ອງພາຍໃນຂອບເຂດຂອງ 10 ℃ ~ 35 ℃;
ຄວາມຊຸ່ມຊື່ນບໍ່ເກີນ 80%;
ການຕິດຕັ້ງທີ່ຖືກຕ້ອງຕາມພື້ນຖານອັນແຂງ;
ໃນສະພາບແວດລ້ອມທີ່ສະອາດໂດຍບໍ່ມີການສັ່ນສະເທືອນ, ສື່ທີ່ເປັນສານກັດກ່ອນແລະການລົບກວນພາກສະຫນາມແມ່ເຫຼັກໄຟຟ້າທີ່ເຂັ້ມແຂງ;
ຊ່ວງຄວາມຜັນຜວນຂອງແຮງດັນການສະໜອງພະລັງງານບໍ່ຄວນເກີນແຮງດັນທີ່ຈັດອັນດັບ  10%.
10%.
2. ອົງປະກອບໂຄງສ້າງ
ເຄື່ອງທົດສອບແບ່ງອອກເປັນສາມສະຖານີເຮັດວຽກ, ເຊິ່ງແມ່ນລະບົບ spindle drive, ລະບົບການໂຫຼດຕົວຢ່າງ, ແລະຜົນບັງຄັບໃຊ້ຕາມແກນ, ສາມສະຖານີເຮັດວຽກມີ spindle drive ດຽວກັນ. ລະບົບໄດນາມິກແລະລະບົບການຄວບຄຸມຊອບແວ.
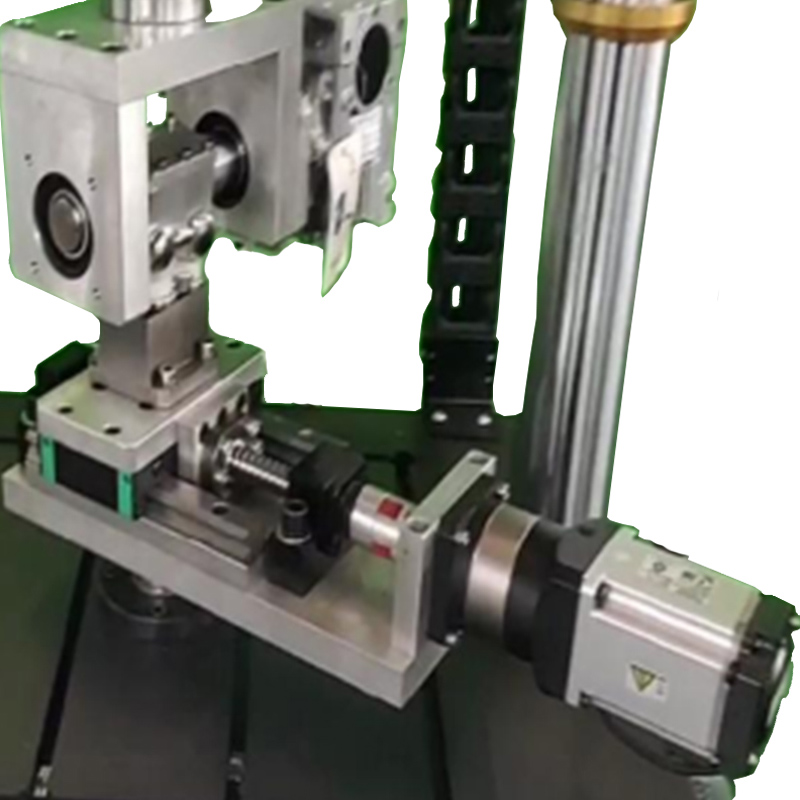
2.1 ລະບົບຂັບ Spindle
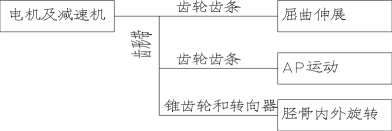
ມໍເຕີແກນໃຊ້ລະບົບຄວບຄຸມຄວາມໄວປະສົມປະສານ Panasonic AC servo ແລະມໍເຕີ. ພະລັງງານມໍເຕີສູງສຸດແມ່ນ 7.5 Kw, ພະລັງງານຂອງມັນຖືກແບ່ງອອກເປັນ 3 ສາຍຜົນຜະລິດ.
ອັນທໍາອິດ: ຫຼັງຈາກ rack ເກຍ, clutch ແມ່ເຫຼັກໄຟຟ້າ, ແລະ torque sensor, ມັນຈະກາຍເປັນ pendulum rotating femur ໄດ້ clutch ແມ່ເຫຼັກໄຟຟ້າຮັບຜິດຊອບສໍາລັບການຄວບຄຸມການເປີດແລະປິດ, ແລະເຊັນເຊີ torque ຮັບຜິດຊອບສໍາລັບການ. ການວັດແທກແຮງບິດໄດ້. ວັດແທກແຮງບິດໃນລະຫວ່າງການປະຕິບັດງານ.
ອັນທີສອງ: ຫຼັງຈາກຜ່ານສາຍເຂັມຂັດແຂ້ວເລື່ອຍ ແລະ ຊັ້ນເກຍ, ມັນຈະກາຍເປັນການແປແບບໂຕ້ຕອບທາງຊ້າຍ ແລະຂວາ, ຂັບລົດຕົວຢ່າງການເຄື່ອນໄຫວ AP .
ອັນທີສາມ: ຜ່ານສາຍແອວແຂ້ວເລື່ອຍ , ເກຍເບວ ແລະເກຍພວງມາໄລ, ມັນຖືກປ່ຽນເປັນຫມຸນຫມຸນຂອງ tibia, ຂັບລົດຕົວຢ່າງໃຫ້ຫມຸນພາຍໃນ ແລະ ພາຍນອກ.
ເສັ້ນທາງສາຍສົ່ງແມ່ນສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.
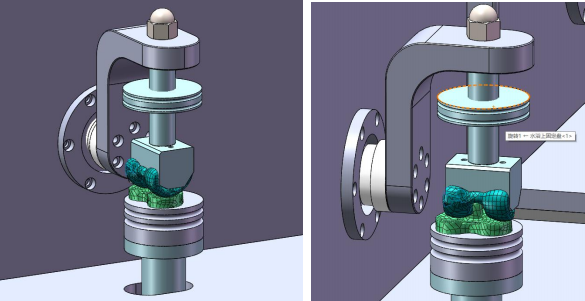
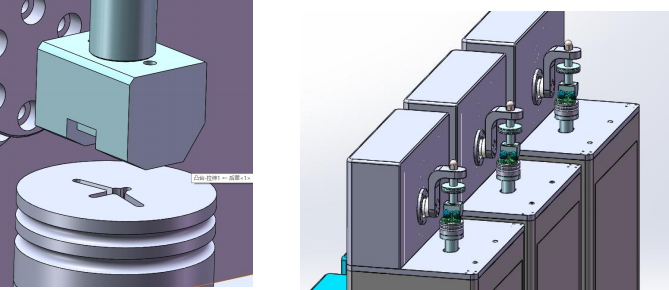
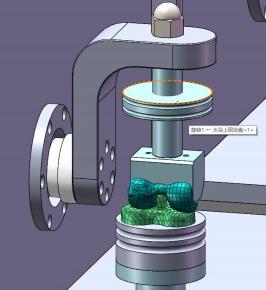
2.2 ຕົວຢ່າງລະບົບການໂຫຼດ
ລະບົບການໂຫຼດຕົວຢ່າງຈໍາລອງອິດສະລະຂອງການເຄື່ອນໄຫວພາຍໃຕ້ສະພາບການຂອງມະນຸດສໍາລັບການ implant ອົງປະກອບຂອງການເຊື່ອມຕໍ່ຂອງຫົວເຂົ່າແມ່ນໄດ້ຮັບການຕິດຕັ້ງແລະການສ້ອມແປງ. ມັນປະກອບດ້ວຍບ່ອນນັ່ງຍຶດ, ບ່ອນນັ່ງເລື່ອນ, ບ່ອນນັ່ງ nylon, ມ້ວນ, ແຂນເລື່ອນ, ແລະອື່ນໆ.
ການຈັດຕັ້ງປະຕິບັດສະເພາະມີດັ່ງນີ້:
ການຕິດຕັ້ງເຄື່ອງມືສວມໃສ່ຫົວເຂົ່າແມ່ນຂ້ອນຂ້າງສັບສົນ. ກະລຸນາຕິດຕັ້ງມັນຢ່າງເຂັ້ມງວດຕາມແຜນວາດ. ນອກຈາກນັ້ນ, ຊ່ອງທາງທີ່ສອດຄ້ອງກັນແມ່ນຕິດຢູ່.
ກະລຸນາໃຊ້ໝາຍເລກສາຍທີ່ກົງກັນໃນເວລາເຊື່ອມຕໍ່ສາຍໄຟ.
(ໂຄງສ້າງທີ່ສະແດງຢູ່ໃນຮູບແມ່ນໃຊ້ເພື່ອສະແດງຫຼັກການການເຄື່ອນໄຫວເທົ່ານັ້ນ, ວັດຖຸຕົວຈິງຈະຊະນະ)
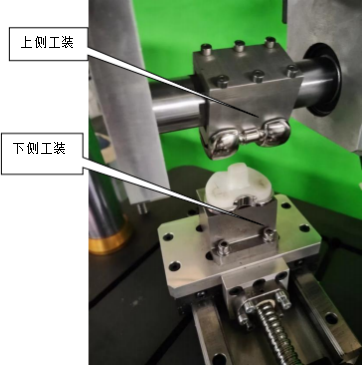

(ໂຄງສ້າງທີ່ສະແດງຢູ່ໃນຮູບແມ່ນໃຊ້ເພື່ອສະແດງຫຼັກການການເຄື່ອນໄຫວເທົ່ານັ້ນ, ວັດຖຸຕົວຈິງຈະຊະນະ)
ທ່ານຕ້ອງປະມວນຜົນເຄື່ອງມືເທິງ ແລະລຸ່ມຄືນໃໝ່ຕາມຕົວຢ່າງເພື່ອໃຫ້ໄດ້ຕາມຄວາມຕ້ອງການໃນການທົດສອບ. (ລາຍລະອຽດແຕ່ລະຂະໜາດຜະລິດຕະພັນແຕກຕ່າງກັນ)

6. ການເລືອກຊ່ອງ ແລະການແກ້ໄຂທີ່ກ່ຽວຂ້ອງ
ສົມທົບກັບຮູບຂ້າງເທິງ, ກວດເບິ່ງວ່າຊ່ອງໃດເຮັດວຽກໂດຍການກວດສອບຊ່ອງ. ໃນເວລາທີ່ປະຕິບັດ ISO 14243.3, ເລືອກ 1-4 aisle, Channel 5 ເປັນຊ່ອງທາງການຂະຫຍາຍສໍາລັບການຍົກລະດັບຕໍ່ມາ. ສໍາລັບການທົດລອງແກນດຽວ ຫຼືສອງແກນອື່ນໆ, ກະລຸນາເລືອກຊ່ອງທີ່ສອດຄ້ອງກັນ.
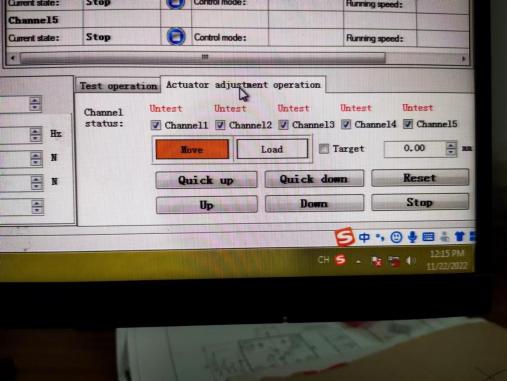
Quick up/up = ການໂຫຼດໄວ/ໂຫຼດໄວ
ລົງ/ລົງດ່ວນ = ລົງ/ລົງດ່ວນ
7. ສອດຄ້ອງກັບ ISO 14243.3 , ມັນຈໍາເປັນຕ້ອງນໍາເຂົ້າຮູບແບບຄື້ນຄວບຄຸມ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ:
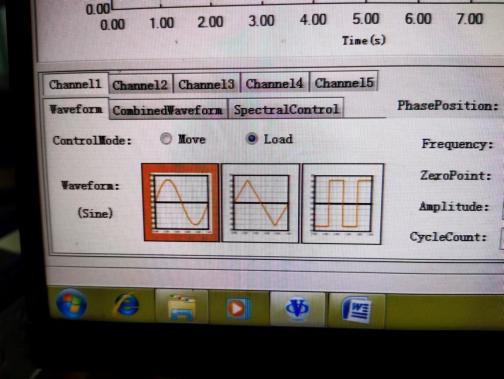
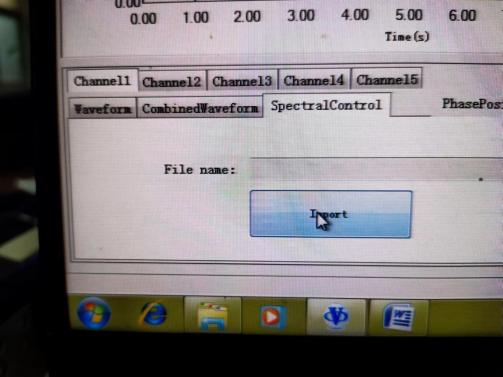
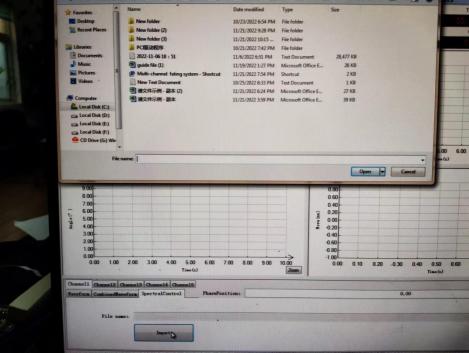
ເລືອກຮູບແບບຄື້ນທີ່ຕັ້ງໄວ້ກ່ອນຈາກໂຮງງານ. ຖ້າທ່ານຕ້ອງການກໍານົດຮູບແບບຄື້ນໃຫມ່ຫຼືການປະຕິບັດ, ທ່ານສາມາດເຮັດໄດ້ໃນໄຟລ໌ນີ້. ແກ້ໄຂແລະບັນທຶກພາຍໃຕ້ຊື່ອື່ນ.
ສຳລັບການປັບປ່ຽນລະອຽດສຳລັບແຕ່ລະຊ່ອງ, ກະລຸນາເບິ່ງຄູ່ມືຊອບແວຊ່ອງດຽວ.
8. ກ່ຽວກັບການປົກປ້ອງ:
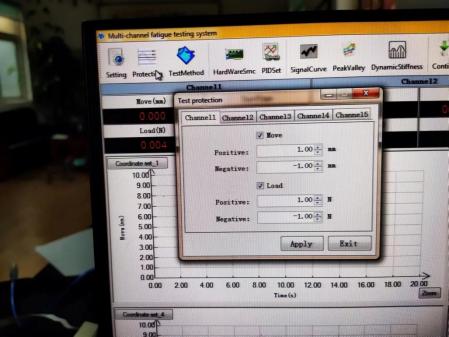
ການທົດລອງບໍ່ເຄື່ອນທີ່ ຫຼືບໍ່ສາມາດດໍາເນີນການໄດ້ຫຼັງຈາກຄລິກເລີ່ມຕົ້ນ, ກວດເບິ່ງວ່າມີພາລາມິເຕີໃດໆທີ່ຕັ້ງໄວ້ຈາກຄວາມທົນທານໃນຕົວເລືອກການປົກປ້ອງ.
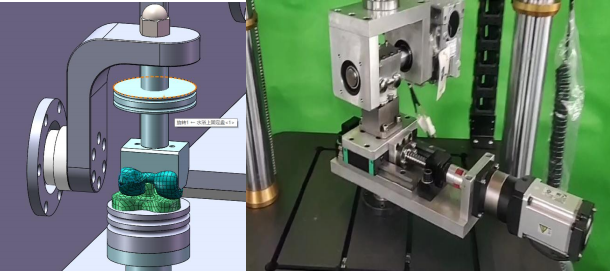
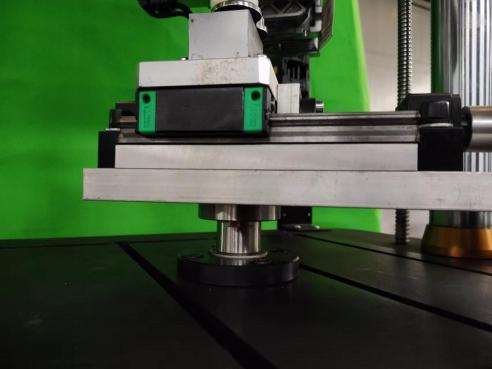
2.3 ລະບົບໂຫຼດກຳລັງຕາມແກນ
ເຄື່ອງຈັກນີ້ໃຊ້ໂຄງສ້າງການໂຫຼດຂອງພາກຮຽນ spring. ກົນໄກການໂຫຼດແມ່ນຂັບເຄື່ອນໂດຍມໍເຕີ stepper, ເຊິ່ງຖືກສົ່ງຜ່ານສາຍແອວເປັນແຂ້ວເລ່ືອເປັນວົງ, ເປັນ pulley synchronous ແລະຄູ່ screw ບານທີ່ມີຄວາມແມ່ນຍໍາ, ແລະນໍາພາໂດຍທາງລົດໄຟຄູ່ມືການເຄື່ອນໄຫວ linear ຄວາມແມ່ນຍໍາເພື່ອຂັບລົດບ່ອນນັ່ງຄໍາຮ້ອງສະຫມັກບັງຄັບ. ບ່ອນນັ່ງບັງຄັບໃຊ້ກໍາລັງຖືກສ້ອມແຊມດ້ວຍກົນໄກການໂຫຼດຂອງພາກຮຽນ spring, ເຊິ່ງນໍາໃຊ້ຜົນບັງຄັບໃຊ້ກັບເວທີເລື່ອນຫຼັງຈາກພາກຮຽນ spring ໄດ້ຖືກບີບອັດ. ຜົນບັງຄັບໃຊ້ການທົດສອບລະຫວ່າງຫນ້າດິນ friction ຂອງຕົວຢ່າງ roller ແມ່ນສ້າງຕັ້ງຂຶ້ນ. ໂດຍການຄວບຄຸມມໍເຕີເພື່ອຂັບລົດທີ່ນັ່ງຜົນບັງຄັບໃຊ້ທີ່ຈະຍ້າຍອອກໄປຂ້າງຫນ້າແລະຖອຍຫລັງໃນອະວະກາດ, ນັ້ນແມ່ນ, ຄໍາຮ້ອງສະຫມັກແລະຂະຫນາດຂອງຜົນບັງຄັບໃຊ້ການທົດສອບສາມາດຄວບຄຸມໄດ້. ເຊັນເຊີການໂຫຼດໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນຍົນຂອງບ່ອນນັ່ງຄໍາຮ້ອງສະຫມັກບັງຄັບ. ເກັບກໍາສັນຍານຜົນບັງຄັບໃຊ້. Linear motion bearing guide ຮັບປະກັນການນຳໃຊ້ ແລະ ຄວາມໝັ້ນຄົງຂອງແຮງທົດສອບ. ພາກຮຽນ spring loading ງ່າຍທີ່ຈະໂຫຼດແລະ unload.
ເມື່ອແຮງທົດສອບເລີ່ມໂຫຼດ, ເຊັນເຊີຈະປ້ອນຄວາມກົດດັນທີ່ຕັ້ງໄວ້ລ່ວງໜ້າເຂົ້າໄປໃນລະບົບຄວບຄຸມໄມໂຄຄອມພິວເຕີ ແລະຄວາມກົດດັນທີ່ຕັ້ງໄວ້ກ່ອນ ໄມໂຄຄອມພິວເຕີຈະຄວບຄຸມມໍເຕີໃຫ້ປີ້ນກັນຈົນກວ່າຄວາມກົດດັນຂອງລະບົບສົມດູນກັບຄວາມກົດດັນທີ່ຕັ້ງໄວ້ລ່ວງໜ້າ.
2.4 Load Soaking System
ຂອງກ່ອງຂອງແຫຼວທີ່ແຊ່ນ້ໍາ, ເຄື່ອງເຮັດຄວາມຮ້ອນ, ເຊັນເຊີອຸນຫະພູມ, ປັ໊ມ peristaltic, ທໍ່ຊິລິໂຄນ, ແລະອື່ນໆ.
ລູກຄ້າສາມາດປະມວນຜົນການວາງຕຳແໜ່ງຂຸມເທິງພື້ນຜິວປາຍກະບອກຕາມຂະໜາດຕົວຈິງຂອງຕົວຢ່າງ, ແລະມຸມຍຶດສາມາດປັບໄດ້. ຫຼັງຈາກການປັບມຸມ, lock ຕົວເລື່ອນຕໍາແຫນ່ງຊ້າຍ.
 {49709218
{49709218

 {49709218
{49709218
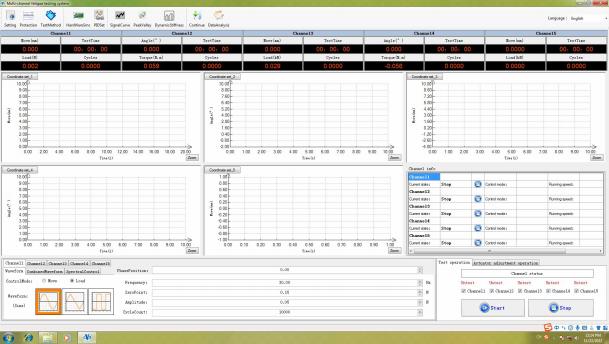
2.5 ລະບົບຄວບຄຸມຊອບແວ
ລະບົບຄວບຄຸມໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນເຄື່ອງຄວບຄຸມແລະເຊື່ອມຕໍ່ກັບແມ່ຂ່າຍທົດສອບຜ່ານສາຍການສື່ສານ. ສະພາບແວດລ້ອມການເຮັດວຽກຂອງຊອບແວແມ່ນ WINDOWS XP. ຊອບແວຄວບຄຸມແມ່ນການໂຕ້ຕອບການດໍາເນີນງານແບບກາຟິກ, ເຊິ່ງຮັບຜິດຊອບໃນການສົ່ງຄໍາແນະນໍາເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນແລະຢຸດຂອງລະບົບ, ຄວາມໄວໃນການດໍາເນີນງານ, ກໍາລັງໂຫຼດ, ອຸນຫະພູມຂອງແຫຼວທີ່ແຊ່ນ້ໍາ, ແລະເກັບກໍາຂໍ້ມູນການດໍາເນີນງານຂອງລະບົບເຊັ່ນ: ແຮງດັນ, ແຮງບິດ, ອຸນຫະພູມ, ເວລາທົດສອບ. , ແລະອື່ນໆໃນໄລຍະການທົດສອບ. ຫຼັງຈາກການຄິດໄລ່ແລະການປຸງແຕ່ງ, ການທົດສອບຜົນບັງຄັບໃຊ້ເວລາ, torque ແລະເສັ້ນໂຄ້ງຂໍ້ມູນອື່ນໆແມ່ນຜົນຜະລິດໃນຮູບແບບຂອງຕາຕະລາງ.
ສົມທົບກັບຮູບຂ້າງເທິງ, ກວດເບິ່ງຊ່ອງເພື່ອຢືນຢັນວ່າຊ່ອງໃດເຮັດວຽກ. ເມື່ອປະຕິບັດ ISO 14243.3, ເລືອກ 1-4 ຊ່ອງ, 5 t ລາວຊ່ອງເປັນຊ່ອງຂະຫຍາຍສໍາລັບການຍົກລະດັບຕໍ່ໄປ. ສໍາລັບການທົດລອງແກນດຽວ ຫຼືສອງແກນອື່ນໆ, ກະລຸນາເລືອກຊ່ອງທີ່ສອດຄ້ອງກັນ.
Quick up/up = ການໂຫຼດ/ໂຫຼດໄວ
Quick down/down = ຖອນການຕິດຕັ້ງ/ຖອນການຕິດຕັ້ງໄວ
7. ສອດຄ້ອງກັບ ISO 14243.3 , ມັນຈໍາເປັນຕ້ອງນໍາເຂົ້າຮູບແບບຄື້ນຄວບຄຸມ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ:
{52481033
ເລືອກຮູບແບບຄື້ນທີ່ສ້າງຂຶ້ນກ່ອນໂຮງງານ. ຖ້າທ່ານຕ້ອງການກໍານົດຮູບແບບຄື້ນໃຫມ່ຫຼືການປະຕິບັດ, ທ່ານສາມາດດັດແປງມັນໄດ້ໃນໄຟລ໌ນີ້. ບັນທຶກພາຍໃຕ້ຊື່ອື່ນ.
ສຳລັບການປັບປ່ຽນລະອຽດສຳລັບແຕ່ລະຊ່ອງ, ກະລຸນາເບິ່ງທີ່ຄູ່ມືຊອບແວຊ່ອງດຽວ .
8. ກ່ຽວກັບການປົກປ້ອງ:
ການທົດລອງບໍ່ເຄື່ອນທີ່ ຫຼືບໍ່ສາມາດດໍາເນີນການໄດ້ຫຼັງຈາກຄລິກເລີ່ມຕົ້ນ, ກວດເບິ່ງວ່າມີພາລາມິເຕີໃດໆທີ່ຕັ້ງໄວ້ຈາກຄວາມທົນທານໃນຕົວເລືອກການປົກປ້ອງ.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese